 Получите свидетельство
Получите свидетельство Вход
Вход


Модуль «Гоночный автомобиль»
Данная модель похожа на реальный автомобиль в том плане, что ее колеса имеют поворотный механизм, который регулируется двигателем. Для увеличения скорости вращения ведущих колес (в данном случае задних) используются шестеренки.
В нижней части машины находится датчик цвета. Он необходим для считывания цвета поверхности. Это позволит машине осуществлять простые операции (остановка, возобновление движения, повороты и т.д.). Датчик цвета способен различать шесть цветов.
Помимо автономного управления роботом есть возможность управлять автомобилем при помощи пульта дистанционного управления как проводного, так и беспроводного.
Один из возможных вариантов внешнего вида гоночного автомобиля представлен на рисунке ниже (см. рисунок 1).

Рисунок 1 – Внешний вид гоночного автомобиля
Собрать данного робота несложно. Начнем с двигателей, их будет два. Помимо самих двигателей понадобятся следующие детали (см. рисунок 2).
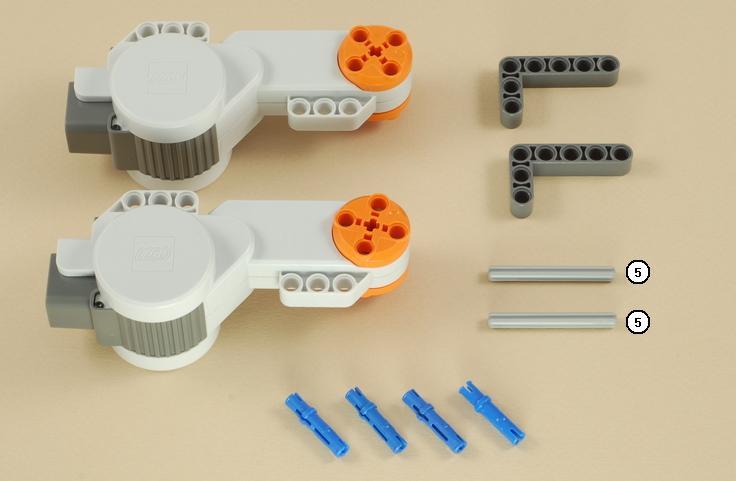
Рисунок 2 – Детали для сборки двигателей
Из вышеприведенных деталей необходимо собрать следующую конструкцию (см. рисунок 3).

Рисунок 3 – Сборка двигателей
К двигателям необходимо подключить задние колеса, потому что именно они будут ведущими (см. рисунок 4).
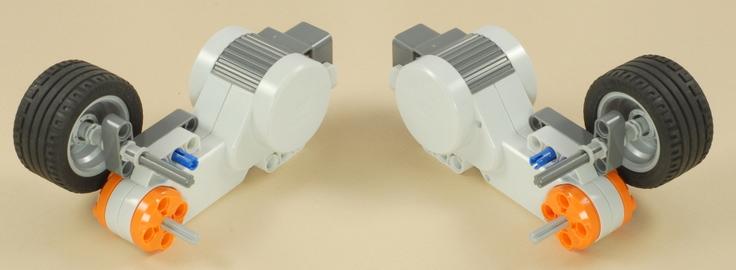
Рисунок 4 – Сборка задних колес
Далее необходимо подключить шестеренки (см. рисунок 5).

Рисунок 5 – Подключение шестеренок
Теперь необходимо прикрепить датчик цвета, который будет считывать цвет под машиной и давать команду контроллеру о выполнении запрограммированного действия (см. рисунок 6).

Рисунок 6 – Расположение датчика цвета
Далее предстоит закрепить вместе заднюю ведущую часть, а именно соединить оба задних колеса, двигатели и датчик в одну конструкцию (смю рисунок 7).
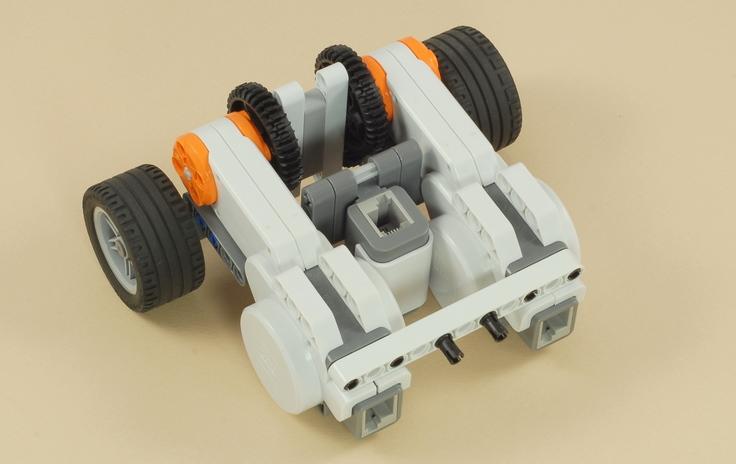
Рисунок 7 – Сборка задней части машины
Передняя часть также состоит из двух колес, одного двигателя (для большей мощности) и поворотного механизма (см. рисунок 8).
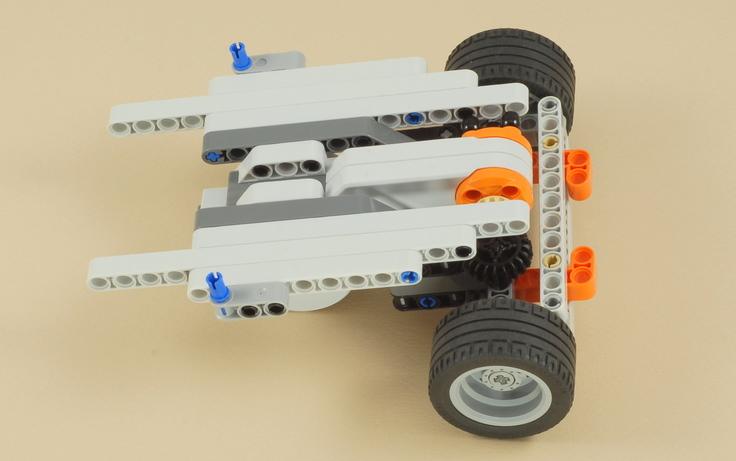
Рисунок 8 – Сборка передней части
Теперь осталось соединить переднюю и заднюю части, чтобы основа гоночного автомобиля была готова. Сделать это можно примерно как на рисунке ниже (см. рисунок 9).

Рисунок 9 – Основа гоночного автомобиля
Прежде чем устанавливать NXT-модуль, нужно подключить провода ко всем двигателям и датчику (см. рисунок 10).

Рисунок 10 – Подключение проводов
И последний шаг – это установка компьютера, подключение к нему проводов, закрепление механизмов, чтобы автомобиль был крепким и устойчивым (см. рисунок 11).

Рисунок 11 – Готовый автомобиль
Гоночный автомобиль готов к заездам. Его без проблем можно модифицировать, добавить нужные датчики, изменить общую конструкцию, но данная основа подойдет практически для всех случаев.
Модуль «Наклонная плоскость»
Наклонная плоскость – это плоскость, которая установлена под определенным углом, но не под прямым.
Данный элемент применялся еще в древности, что позволяло людям поднять на высоту объемный тяжелый груз.
В робототехнике тоже можно найти применение наклонной поверхности.
Например, есть задача: роботу необходимо подняться на высокую ступень.
Из-за своей конструкции робот не может преодолеть высокую вертикальную преграду, просто перепрыгнув ее. Поэтому нужно воспользоваться несколькими способами, к примеру, соорудить подъемник или поставить наклонную поверхность, по которой робот практически без проблем заедет.
Усложнить задание можно тем, что робот сам должен привезти и установить наклонную плоскость.
Подобных заданий можно подобрать множество, провести связь с физикой и т.д.
Рассмотрим немного подробнее задачу с подъемом груза по наклонной поверхности. Дана стандартная ситуация (см. рисунок 12).
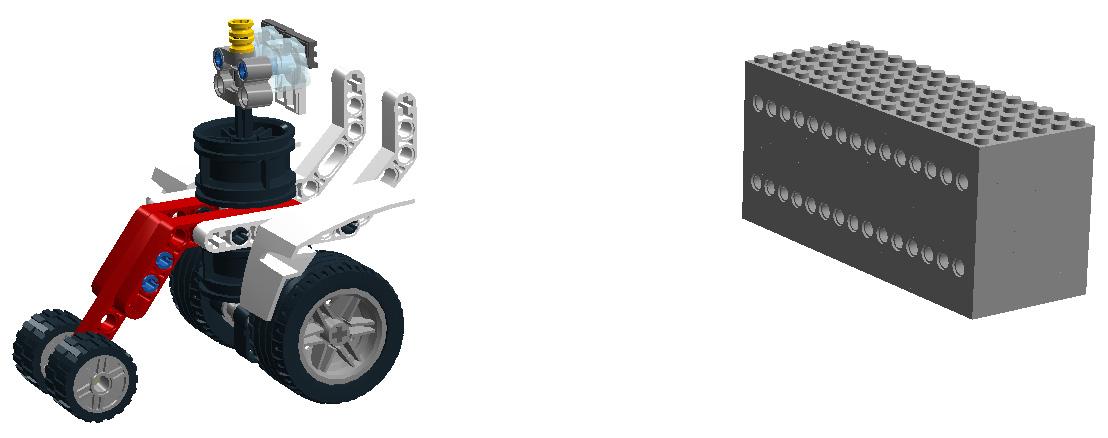
Рисунок 12 – Исходная ситуация
Робот должен перевезти горизонтальную планку и установить ее таким образом, чтобы получилась наклонная поверхность (см. рисунок 13).
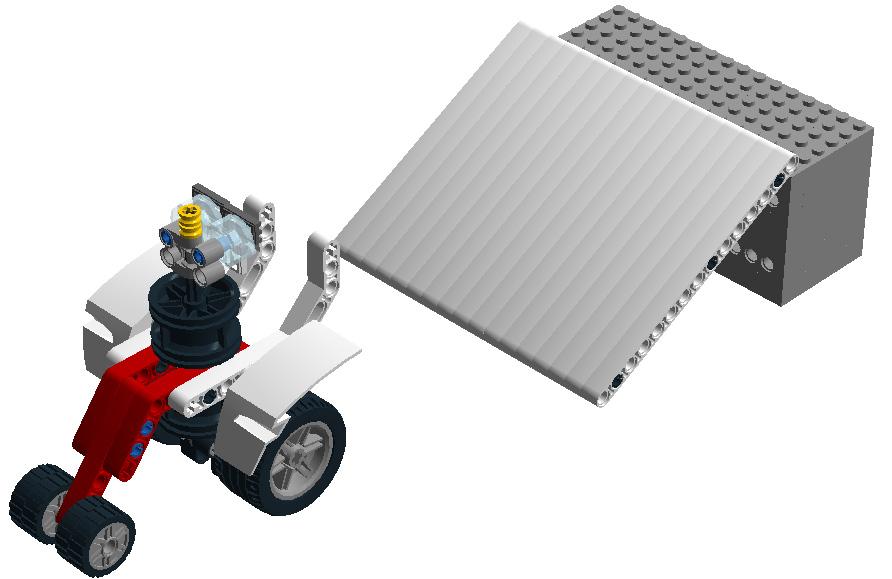
Рисунок 13 – Конечная ситуация
В более сложных ситуациях робот может подниматься на многоуровневые горки. Усложнить задачу можно определенными действиями на каждом уровне (к примеру, на каждом уровне оставлять предмет). Примерная ситуация представлена ниже (см. рисунок 14).
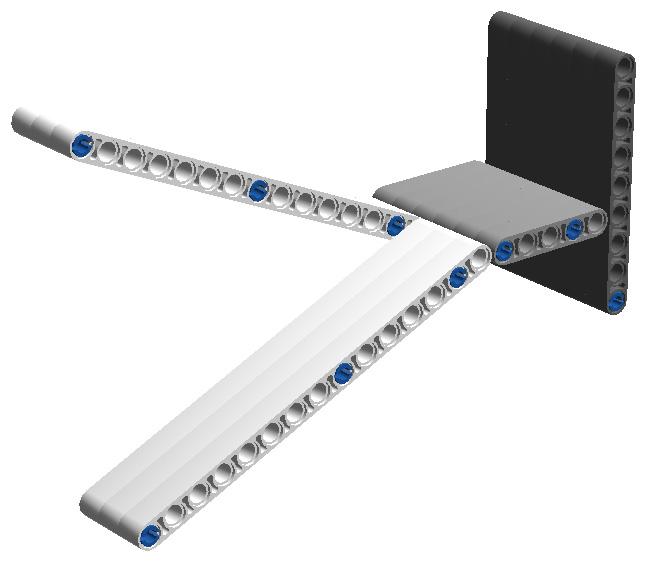
Рисунок 14 – Многоуровневая наклонная поверхность
Обратными задачами могут быть, наоборот, по спуску по наклонной плоскости.









 Робототехника "Разработка гоночного автомобиля" (1.25 MB)
Робототехника "Разработка гоночного автомобиля" (1.25 MB)
 0
0 969
969 40
40 Нравится
0
Нравится
0










