Министерство образования и науки Российской Федерации
ФГБОУ ВПО «Красноярский государственный педагогический университет им. В.П. Астафьева»
Институт математики, физики и информатики (ИМФИ)
Базовая кафедра информатики и информационных технологий в образовании
КУРСОВАЯ РАБОТА
«Методика обучения детей робототехнике с использованием конструкторов III поколения LEGO Education MINDSTROMS EV3»
Выполнила: Конради Т.А.
Студент: 3 курса
отделения математики и информатики
Проверил: Турушев М.И.
Проверил:_________________
_________________(подпись)
Оглавление
Введение 3
1. Робототехника в процессе обучения 4
2. LEGO Education MINDSTROMS EV3 – новая платформа для занятий робототехникой 13
2.1. LEGO Mindstorms Education EV3 - базовый набор 13
2.2. Подробное описание робота LEGO Mindstorms Education EV3 14
3. Дополнительная общеобразовательная программа «Робототехника» 24
Заключение 38
Список литературы 40
Введение
Наш век – век высоких технологий, и робототехника является одной из самой перспективной и популярной областью науки.
Робототехника — область науки и техники, связанная с изучением, созданием и использованием принципиально нового технического средства комплексной автоматизации производственных процессов — робототехнических систем.[8]
Робототехника нашла широкое применение в медицине, в космонавтике, на производстве, в кинематографии и во многом другом. Мне же интересна робототехника в образовании. На данный момент времени, робототехника как учебная дисциплина в образовательных учреждениях носит характер дополнительного образования, но в некоторых регионах нашей страны робототехнику хотят ввести как отдельную, обязательную для изучения, дисциплину.
Для изучения робототехнике в школе существует множество робототехнических наборов, таких как «Технология и физика», «Пневматика», «Возобновляемые источники энергии» и др., представленные компанией LEGO. И совсем недавно компания LEGO представила новое, уже третье, поколение роботов LEGO Education MINDSTROMS EV3, применяемых для образовательных целей.
Применение LEGO Education Mindstorms EV3 в образовательном процессе делает решение сложных задач увлекательным исследовательским процессом, позволяя усвоить не только знания по изучаемой теме, но и освоить инструмент для изучения любых других тем. Платформа EV3 задумана как уникальный инструмент для поиска творческих альтернативных решений, способствует развитию навыков работы в команде, совместной реализации идей и проектной деятельности.
Цель: разработать дополнительную общеобразовательную программу по курсу «Робототехника» для детей среднего и старшего школьного возрастов с использованием конструкторов III поколения LEGO Education MINDSTROMS EV3.
Задачи:
найти необходимый теоретический материал и выделить главное;
проанализировать полученную информацию;
составить дополнительную общеобразовательную программу по курсу «Робототехника» с использованием конструкторов III поколения LEGO Education MINDSTROMS EV3.
- Робототехника в процессе обучения
До недавнего времени робототехника развивалась, в основном, в качестве внеклассной формы работы. Большинство публикаций посвящалось анализу опыта этой работы. В настоящее время пока не проводятся специальные исследования по использованию робототехники в учебном процессе. Вместе с тем в связи с требованиями ФГОС имеются возможности для модернизации преподавания с применением робототехнических наборов.
Можно определить следующие педагогические цели использования робототехники в преподавании:
1) демонстрация возможностей робототехники как одного из ключевых направлений научно-технического прогресса;
2)демонстрация роли робототехники в проектировании и использовании современной техники;
3) повышение качества образовательной деятельности:
- углубление и расширение предметного знания,
- развитие экспериментальных умений и навыков,
- совершенствование знаний в области прикладных наук,
- формирование умений и навыков в сфере технического проектирования, моделирования и конструирования;
4) развитие у детей мотивации изучения предмета, в том числе познавательного интереса;
5) усиление предпрофильной и профильной подготовки учащихся, их ориентация на профессии инженерно-технического профиля.
В связи с появлением новых возможностей в организации учебного процесса с использованием роботов можно выделить следующие компоненты учебного процесса, в которых появляется робототехника:
1. Урочные формы работы: измерения, проектные работы, демонстрационный эксперимент, лабораторные работы, сообщения, практикумы.
2. Элективные курсы, клубная и кружковая формы работы.
3. Исследования, проектная работа, участие в НПК, конкурсах, включая дистанционные и сетевые формы.
При этом школьник должен иметь возможность самоопределиться в выборе уровня знакомства с робототехникой. Либо ему будет достаточно базового уровня, который предполагает в основном урочные формы работы, либо он будет знакомиться с робототехникой по расширенному или углублённому варианту, выбирая элективные курсы, проекты и другие формы (рис. 1).
Рис.1. Уровни знакомства с робототехникой в процессе изучения физики
Для наиболее полного достижения поставленных целей использования робототехники, роботы в школьном курсе должны быть представлены не только как средство практической деятельности школьников, но и как объект теоретического изучения. Таким образом, нами предлагается следующая система использования учебных роботов в предметной области робототехники:
| Робот как объект изучения | Изучение принципа работы элементной базы робота. Роль робота в современных научных исследованиях. Роль робота в проектировании и использовании современной техники | Датчики, приводы (электропривод, гидропривод, пневмопривод), светоиндикация, механические передачи, параметры электрических цепей робототехнического оборудования и др. Космические исследования, исследования глубин, радиационная разведка, исследование микромира и др. Промышленные роботы, роботы на транспорте, использование роботов в экстремальных условиях, медицине, сфере услуг. |
| Робот как средство изучения | Робот как средство измерения Робот как средство постановки автоматизированного эксперимента Робот как средство моделирования | Использование датчиков базового конструктора и совместимых датчиков (Vernier, HiTechnic и др.) Конструктор используются как измерительная система с обработкой и фиксацией результатов в различных видах. Сборка демонстрационных и лабораторных установок из робототехнического оборудования. Интеграция оборудования кабинета информатики и робототехнического оборудования Моделирование промышленных, бытовых, транспортных и других видов устройств; Моделирование явлений природы. |
| Робот как средство творческого проектирования | Робот как средство технической модернизации существующих устройств Проектирование новых роботизированных устройств | Совместное использование роботов с другими системами, адаптация робота к новым условиям. Проектирование новых видов датчиков и других систем, вымышленных устройств из будущего и др |
В некоторых направлениях представленной системы имеются достаточно интересные методические наработки как у нас в стране, так и за рубежом. В последние годы появилось достаточно много публикаций, знакомящих с опытом внедрения робототехники в учебный процесс. Вместе с тем, ряд учебных пособий по организации курсов и кружков и других видов внеклассной работы также может быть полезен при организации предметной работы по робототехнике.
Ниже представлен ряд классификаций методов обучения, которые можно использовать в педагогическом процессе для реализации педагогических целей использования робототехники в преподавании. Но прежде чем приступить к изучению разнообразия методов обучения нужно для начала узнать, что же такое «метод обучения».
Методы обучения - это система последовательных взаимосвязанных действий учителя и учащихся, обеспечивающих усвоение содержания образования. Метод обучения характеризуется тремя признаками: обеспечение цели обучения, способ усвоения, характер взаимодействия субъектов обучения. Понятие «метод обучения» отечественные педагоги трактовали по–разному. Одни понимали его как «способ передачи другими познаний» (Д.И. Тихомиров) или относили к нему все «способы, приёмы и действия учителя» (К.В. Ельницкий). Другие рассматривали метод обучения как «совокупность координированных приёмов преподавания» (С.А.Ананьев) и т.д.
Методы обучения – это категория историческая, они изменялись с изменением целей содержания образования. Американский педагог К.Керр выделяет четыре «революции» в области методов обучения в зависимости от преобладающего средства обучения. Первая состояла в том, что учителя – родители, служащие образцом, уступили профессиональным учителям; сущность второй – замена устного слова письменным; третья ввела в обучение печатное слово; четвёртая, происходящая в настоящее время,
Эмпирический подход к проблеме методов обучения привёл к большому разнобою в классификации методов у разных авторов без научного обоснования числа, системности, необходимости, достаточности, принципов классификации и границ применения методов обучения. Исследования педагогов и психологов показали, что усвоение знаний и способов деятельности происходит на трёх уровнях: осознанного восприятия и запоминания; применения знаний и способов деятельности по образцу или в исходной ситуации; творческого применения. Методы обучения призваны обеспечивать все уровни усвоения. В настоящее время методы обучения обеспечивают усвоение знаний и способов деятельности главным образом на первых двух уровнях. Одной из причин недостаточного внедрения методов обучения, обеспечивающих творческое применение знаний, является слабая разработанность теоретической концепции методов обучения, которой свойственны описательность, эмпиризм. В 70 – 80 –е годы XX века осуществлены попытки многоаспектного и комплексного подходов к изучению методов обучения (А.Н.Алексюк, Ю.К.Бабанский, И.Д.Зверев, И.Я.Ларнер, М.И.Махмутов, М.Н.Скаткин и др.).[1]
Различные подходы к классификации методов обучения связаны с выбором разных оснований, отражающих аспекты их изучения.
Перцептивный подход, основой которого является источник передачи информации и характер ее восприятия, предполагает выделение словесных, наглядных и практических методов обучения, отражающих как деятельность учителя (рассказ, лекция, демонстрация, упражнения и др.), так и деятельность учащихся (слуховые, зрительные, моторные восприятия) (Е.Я.Голант, Н. М. Верзилин, С. Г. Шаповаленко и др.).
Управленческая концепция, в основе которой лежат ведущие дидактические задачи, решаемые на том или ином этапе обучения. В соответствии с такой основой выделяются методы приобретения знаний, формирования умений и навыков, применения знаний, творческой деятельности, закрепления, проверки знаний, умений и навыков (М.А.Данилов, Б.П.Есипов).
Логический подход за основу берёт логику изложения материала учителем и логику восприятия его учащимися, которая может быть индуктивной и дедуктивной, отсюда и соответствующие методы обучения (А. Н.Алексюк).
При гностическом подходе основанием является характер познавательной деятельности учащихся, согласно которому методы обучения подразделяются на информационно-рецептивные, репродуктивные, проблемного изложения, эвристические, исследовательские (И.Я.Лернер, М.Н.Скаткин).
Кибернетический подход, при котором основанием выступает способ управления познавательной деятельностью и характер установления обратной связи, предлагает выделение методов алгоритмизации и программированного обучения (Т.А.Ильина, Л. Н.Ланда и др.).
В педагогическом процессе более рациональной и обоснованной является классификация методов обучения, предложенная И.Я.Лернером и М.Н.Скаткиным. Она разработана в соответствии с концепцией содержания образования. В этой концепции каждому элементу содержания образования соответствуют свои методы обучения. Авторы определяют их как систему последовательных действий учителя, организующих и обусловливающих познавательную и практическую деятельность учащихся по усвоению всех элементов содержания образования для достижения целей обучения. В системе дидактических методов обучения И.Я.Лернер и М. Н. Скаткин выделили две группы: репродуктивные (информационо-рецептивные и собственно репродуктивные) и продуктивные (проблемное изложение, эвристические, исследовательские). Специфика этих методов обучения, связанная с деятельностью учителя (преподавание) и деятельностью учащихся (учение).
Метод обучения может играть как определяющую, так и вспомогательную роль, служа средством реализации другого метода. Каждый из методов предусматривает особый вид обучающей деятельности учителя и познавательной деятельности учащихся, а также ведет к специфическому результату - усвоению соответствующего ему вида содержания.
Основные методы обучения имеют различные формы их воплощения и средства реализации. Например, методы информационно-рецептивный и проблемного изложения могут быть осуществлены посредством устного слова, чтения учебника, с помощью кино и телевидения, других изобразительных средств, предъявления алгоритмов; репродуктивный предполагает повторение учащимися предварительно показываемых учителем способов деятельности (на вербальном и образном материале, практическими действиями с предметами и знаковой системой). Эвристический и исследовательский методы включают конструирование, проектирование, планирование и проведение эксперимента, решение поисковых задач. Названные методы являются общими для обучения любому предмету, но в каждом из них они приобретают свою специфическую форму.
Для специальной педагогики особое значение имеет классификация методов с учетом целостного подхода к процессу обучения, разработанная Ю.К. Бабанским. Он выделяет три группы методов.
I группа – методы организации и осуществления учебно–познавательной деятельности. Данная группа методов включает в себя:
словесные, наглядные и практические (передача и восприятие учебной информации – источник знаний);
индуктивные и дедуктивные (интеллектуальная деятельность);
репродуктивные и проблемно поисковые (развитие мышления);
самостоятельная работа учащихся под руководством учителя.
II группа – методы стимулирования и мотивации учебно– познавательной деятельности.
III группа – методы контроля и самоконтроля.
Ю. К. Бабанский, выдвигая принцип оптимальности при выборе методов обучения, предлагал исходить из того, что каждый метод ориентирован на решение определенного круга педагогических и учебных задач. Однако при этом он косвенно способствует решению и других задач, но не в той мере, в которой они могут быть решены с помощью иных методов. Отсюда вытекает необходимость оценки возможностей каждого метода обучения, знания его сильных и слабых сторон и выбора на этой основе их оптимальных сочетаний.
Среди всех зависимостей, определяющих построение и выбор методов обучения, на первом месте находится их соответствие целям образования. В практической деятельности учитель руководствуется этими целями и содержанием образования. Далее он соотносит методы обучения с конкретной педагогической задачей, анализирует учебную ситуацию, определяет уровень развития учеников и уровень сформированности у них универсальных учебных действий.
Методы обучения сами по себе не могут быть ни хороши, ни плохи, необходима их система. "Никакое средство педагогическое, даже общепринятое, каким обычно у нас считается и внушение, и объяснение, и беседа, и общественное воздействие, не может быть признано всегда абсолютно полезным. Самое хорошее средство в некоторых случаях обязательно будет самым плохим" [3]. Методы обучения, при помощи которых достигаются ожидаемые результаты, бесконечно варьируются в зависимости от множества обстоятельств и условий протекания процесса обучения.
- LEGO Education MINDSTROMS EV3 – новая платформа для занятий робототехникой
EV3 – новое поколение ЛЕГО роботов,
применяемых для образовательных целей. Продукты EV3 были созданы при тесном взаимодействии с более чем 800 преподавателями со всего мира. Поэтому EV3 – идеальный инструмент для обучения таким предметам, как информатика, физика, технология, проектирование и математика с помощью работы с датчиками, моторами, программным обеспечением и самим микрокомпьютером EV3.
Платформа EV3 включает в себя набор разнообразных учебных пособий, поставляемых в цифровых версиях и инсталлируемых непосредственно в программную среду LEGO Education MINDSTORMS. Встроенная в программное обеспечение электронная тетрадь позволит ученикам с легкостью фиксировать свои успехи на протяжении всех занятий, а преподавателям – следить за работой своих подопечных и проводить оценку проделанной работы.
Применение EV3 делает решение сложных задач увлекательным исследовательским процессом, позволяя усвоить не только знания по изучаемой теме, но и освоить инструмент для изучения любых других тем. Платформа EV3 задумана как уникальный инструмент для поиска творческих альтернативных решений, способствует развитию навыков работы в команде, совместной реализации идей и проектной деятельности.
- LEGO Mindstorms Education EV3 - базовый набор
Базовый набор разработан для любознательных робототехников в возрасте от 10-ти лет. За основу взята фирменная база LEGO Techniс.
EV3 – третье поколение программируемых роботов от LEGO Education.
При помощи LEGO Education Mindstorms EV3 ребенок сможет:
• собирать несколько стандартных моделей роботов;
• разобраться в принципах работы сервомоторов и датчиков;
• запрограммировать своего первого автономного робота при помощи специализированного ПО
- Подробное описание робота LEGO Mindstorms Education EV3
LEGO Mindstorms – робототехнический конструктор для детей в возрасте от 10 лет. В качестве строительных блоков для робота используются детали LEGO Techniс. Но построить каркас робота недостаточно: надо «научить» его получать информацию из окружающей среды и реагировать на нее. Для этого используются специальные устройства – сенсоры: они позволяют определять цвет, освещенность, расстояние до ближайших предметов и многое другое. Реагировать на «раздражители» робот может с помощью моторов – либо ехать куда-нибудь, либо что-нибудь делать – например, укусить обидчика за палец. А «мозгом» робота является специальный программируемый блок, к которому подключаются все моторы и датчики.
Перейдем к составу набора LEGO Mindstorms EV3. Вот что входит в образовательную версию набора:
Датчики и моторы
Рассмотрим, что же изменилось в EV3 по сравнению со старой версией NXT.
В наборе будет 3 мотора, но один из них будет отличаться как по размерам так и по техническим характеристикам.
Датчик звука был заменен на гироскоп. Остальные типы датчиков остались прежними.
Еще одной особенностью является авто-определение датчиков и моторов при их подключении к блоку – о данной особенности я расскажу в разделе, описывающем новую среду программирования EV3.
Характеристики датчиков и моторов представлены ниже.
Датчик касания
Датчик касания EV3 очень похож на датчик предыдущей версии. Он определяет, когда кнопка нажата или отпущена, также он может подсчитывать одиночные или многократные нажатия.
Датчик цвета
Датчик цвета EV3 различает 7 цветов и может определить отсутствие цвета. Как и в прошлой версии, он может работать как датчик освещенности.
Измеряет отраженный красный свет и окружающее освещение
Способен определять различия между белым и черным или цветами: синим, зеленым, желтым, красным, белым и коричневым
Частота работы: 1 кГц
Гироскоп
Гироскопический датчик EV3 измеряет вращательное движение робота и изменение его положения.
Может использоваться для определения текущего направления вращения
Точность: +/- 3 градуса на 90 градусов оборота (в режиме измерения наклона)
Может определить максимум 440 градусов/c (в режиме гироскопа)
Частота работы: 1 кГц
Ультразвуковой датчик расстояния
К основной функции ультразвукового датчика EV3 добавилась еще одна - он также может "слушать" ультразвуковые колебания, испускаемые другими датчиками ультразвука.
Может измерять расстояние в диапазоне 3 - 250 см.
Точность измерений: +/- 1 см
Дискретность результата измерений: 0.1 см.
Может быть использован для поиска других активных ультразвуковых датчиков (режим прослушивания)
Красная LED подсветка вокруг "глаз"
Большой мотор
Большой сервомотор EV3 очень похож на предыдущую версию мотора NXT, однако корпус мотора стал чуть больше (виртуально он теперь занимает 14x7x5 отверстий против бывших 14x6x5). Также были изменены места крепления моторов и их тип.
Максимальные обороты - 160- 170 об/мин.
Заданный крутящий момент - 40 Н/см
Реальный крутящий момент - 20 Н/см.
Встроенный датчик угла поворота (энкодер) мотора с точностью 1 градус
Средний мотор
Средний сервомотор EV3 основан на Power Function моторе аналогичного размера. Дополнительное место потребовали только датчик угла поворота и порт для подключения. Этот мотор отлично подойдет для работы под низкими нагрузками и высокими скоростями.
Максимальные обороты - 240- 250 об/мин.
Заданный крутящий момент - 12 Н/см
Реальный крутящий момент - 8 Н/см.
Встроенный датчик угла поворота (энкодер) мотора с точностью 1 градус
NXT датчики, моторы и кабели совместимы с EV3, таким образом, все ранее построенные роботы могут управляться новым блоком.
Программируемый блок EV3
Серьезные изменения произошли и с микрокомпьютером EV3. По сравнению с NXT, EV3 блок имеет более быстрый процессор, больше памяти. Прошивка блока EV3 базируется на свободно распространяемой ОС Linux, что дает возможность создавать свои прошивки для блока. Подключить робота к компьютеру теперь возможно не только через USB и Bluetooth, но и по Wi-Fi. Между собой роботы также могут «общаться» по USB, Bluetooth и Wi-Fi.

Ниже представлена сравнительная таблица характеристик NXT и EV3:
|
| NXT | EV3 |
| Процессор | Atmel 32-Bit ARM AT91SAM7S256
48 MHz
256 KB FLASH памяти
64 KB RAM памяти | ARM9
300 MHz
16 Mb Flash памяти
64 Mb RAM памяти |
| Со-процессор | Atmel 8-Bit ARM AVR, ATmega48
8 MHz
4 KB FLASH памяти
512 Byte RAM памяти | отсутствует |
| Операционная система | Проприетарная | Linux |
| Порты ввода (для датчиков) | 4 порта
Поддерживает аналоговые, цифровые датчики
Скорость передачи данных: 9600 бит/с (I2C) | 4 порта
Поддерживает аналоговые, цифровые датчики
Скорость передачи данных: до 460.8 Кбит/с (UART) |
| Порты вывода (для моторов) | 3 порта | 4 порта |
| Передача данных по USB | Используется режим full speed: 12 Мбит/c | Используется режим high speed: 480 Мбит/с |
| Подключение USB устройств | Нет возможности | Возможно последовательное подключение до 3 устройств, в том числе сетевых карт wi-fi и flash карт |
| Устройство для чтения SD карт | Отсутствует | Поддерживает miniSD карты, максимальный объем - 32 Гб |
| Подключение к мобильным устройствам | Возможно подключение к устройствам с ОС Android | Возможно подключение к устройствам с ОС Android и iOS (iPhone, iPad) |
| Экран | LCD, монохромный
100 * 64 пикселей | LCD, монохромный
178 * 128 пикселей |
| Взаимодействие | Bluetooth
USB 2.0 | Bluetooth v2.1 DER
USB 2.0 (при подключении к ПК
USB 1.1 (при последовательном подключении нескольких устройств)
Wi-Fi |
Среда программирования
Среда разработки EV3 была значительно улучшена. Теперь все материалы для робота: программы для робота, документацию, результаты экспериментов, фото и видео - можно хранить в проекте. Был также добавлен инструмент zoom, который позволяет масштабировать программу, чтобы, например, увидеть всю программу целиком. Стоит отметить, что NXT блок можно программировать с помощью новой среды EV3, однако старый блок поддерживает не все особенности нового языка программирования.
Перечислим основные нововведения среды программирования EV3:
Кроме нового языка программирования появились программы под Android и iPhone\iPad для управления роботом. Также на базе программы Autodesk Invertor Publisher создана программа для создания и просмотра пошаговых 3D инструкций. В этой программе можно масштабировать и вращать модель на каждом этапе сборки, что позволяет строить более сложных роботов по инструкциям.
Robolab
Robolab - среда программирования созданная Lego совместно с LabVIEW и предназначенная для программирования "кирпича" RCX. Это среда программирования устанавливалось в учебных классах использовавших Mindstorms, и поддерживает Lego Cam. В последнюю версию (Robolab v2.9) была добавлена поддержка NXT. И, не смотря на то, что Lego официально объявила о прекращении поддержки Robolab, Robolab 2,9 по - прежнему доступен и существует еще множество форумов пользователей и других источников помощи, посвященных этой среде.[5]
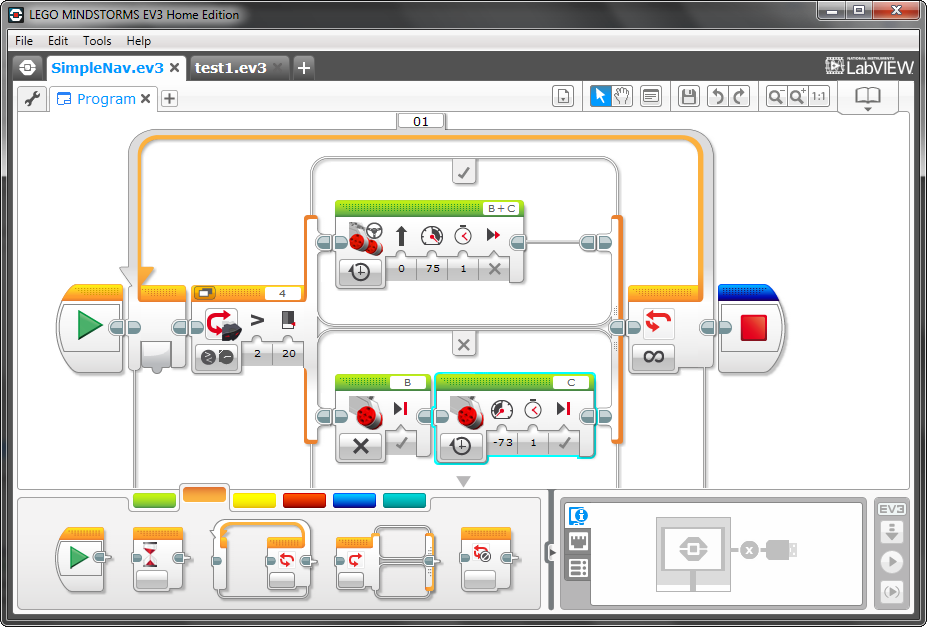
EV3-G
Программное обеспечение, которое поставляется вместе с комплектами EV3 и является следующей версией среды визуальной разработки NXT-G. Совместимо с NXT. Поставляется в двух вариантах - Education Edition (для учебных классов) и Home Edition (для персонального использования). Различия между ними приведены в таблице.[5]
| Сравнение EV3 Education Edition и Home Edition |
|
| Education Edition | Home Edition |
| Рабочий стол (основное различие) | Ориентирован на преподавателей и девочек (видимо, на стереотипах о девочках) - поэтому практически пуст | Ориентирован на мальчиков от 8 до 14 лет - поэтому выполнен в смелых и темных цветах, и на нем присутствуют модели роботов изображенные в несколько агрессивной манере |
| Цена | US$100 Single licence, US$400 Site Licence | Бесплатно |
| Язык программирования | EV3-G | EV3-G |
| Редакторы графики и звука | есть | есть |
| Система регистрации данных | есть | нет |
| Руководства | Общие руководства по всем аспектам устройства Ev3 | Руководства, предназначенные для каждой конкретной модели |
| Инструкции по сборке | EV3 Core Base, GyroBoy, Colour Sorter, Puppy, Robot Arm H25 | TRACK3R, SPIK3R, EV3RSTORM, R3PTAR, GRIPP3R, а также ссылки на другие дополнительные модели |
| Поддержка датчиков | Поддерживает датчики обеих комплектов и EDU и Home | Поддерживает датчики обеих комплектов и EDU и Home (необходимо скачивать блоки для датчиков EDU) |
Базовые роботы
В образовательный набор включены инструкции для сборки 5 роботов:
Color Sorter. Классическая задача по сортировке предметов (в данном случае - Lego деталей) по цвету.
Gyro Boy. Робот-сигвей, использующий гироскоп для балансировки.
Puppy. Робот-собачка, которую можно гладить, кормить. Спать и справлять нужду она также умеет. Напоминает тамагочи.
Робо-рука. Позволяет перемещать предметы.
Для EV3 набора был подготовлен ресурсный набор LEGO MINDSTORMS Education EV3, позволяющий собирать другие модели, используя новые детали.
- Дополнительная общеобразовательная программа «Робототехника»
Срок реализации: 1 год; возраст уч-ся: 10-17лет
Пояснительная записка
Программа «Робототехника» научно-технической направленности, ориентирована на реализацию интересов детей в сфере конструирования, моделирования, развитие их информационной и технологической культуры. Программа соответствует уровню основного общего образования, направлена на формирование познавательной мотивации, определяющей установку на продолжение образования; приобретение опыта продуктивной творческой деятельности.
Актуальность и педагогическая целесообразность программы
В период перехода современного общества от индустриальной к информационной экономике, от традиционной технологии к гибким наукоёмким производственным комплексам исключительно высокие темпы развития наблюдаются в сфере робототехники. По последним данным, сегодня в мире работают 1,8 млн. самых различных роботов - промышленных, домашних, роботов-игрушек. Век накопления знаний и теоретической науки сменяется новой эпохой – когда всевозможные роботы и механизмы заполняют мир. Потребности рынка труда в специалистах технического профиля и повышенные требования современного бизнеса в области образовательных компетентностей, выдвигают актуальную задачу обучения детей основам радиоэлектроники и робототехники. Технологическое образование является одним из важнейших компонентов подготовки подрастающего поколения к самостоятельной жизни. Деятельностный характер технологического образования, направленность содержания на формирование учебных умений и навыков, обобщенных способов учебной, познавательной, коммуникативной, практической, творческой деятельности позволяет формировать у школьников способность ориентироваться в окружающем мире и подготовить их к продолжению образования в учебных заведениях любого типа. Актуальность и мотивация для выбора подростками данного вида деятельности является практическая направленность программы, возможность углубления и систематизации знаний из курса основного образования. Работа с образовательными конструкторами MINDSTORM EV3 позволяет школьникам в форме познавательной игры узнать многие важные идеи и развить необходимые в дальнейшей жизни навыки. Занятия по программе «Робототехника» формируют специальные технические умения, развивают аккуратность, усидчивость, организованность, нацеленность
Проведение краевых массовых мероприятий научно-технической направленности показывает все большую представленность детских проектов по тематике «робототехника и конструирование», в том числе и по лего-робототехнике.
Цель программы: развитие научно-технического и творческого потенциала личности ребенка путем организации его деятельности в процессе интеграции начального инженерно-технического конструирования и основ робототехники.
Задачи программы:
углубление знаний по основным принципам механики;
ознакомление с основами программирования в компьютерной среде MINDSTORMS EV3 на языках EV3-G и Robolab;
развитие умения творчески подходить к решению задачи;
развитие умения довести решение задачи до работающей модели;
развитие умения излагать мысли в четкой логической последовательности, отстаивать свою точку зрения, анализировать ситуацию и самостоятельно находить ответы на вопросы путем логических рассуждений.
Отличительные особенности программы
Реализация программы осуществляется с использование методических пособий, специально разработанных фирмой LEGO для преподавания технического конструирования на основе своих конструкторов. Настоящий курс предлагает использование образовательных конструкторов MINDSTORMS EV3 как инструмента для обучения школьников конструированию, моделированию и компьютерному управлению на уроках робототехники. Простота в построении модели в сочетании с большими конструктивными возможностями конструктора позволяют детям в конце урока увидеть сделанную своими руками модель, которая выполняет поставленную ими же самими задачу. При построении модели затрагивается множество проблем из разных областей знания – от теории механики до психологии.
Курс предполагает использование компьютеров и специальных интерфейсных блоков совместно с конструкторами. Важно отметить, что компьютер используется как средство управления моделью; его использование направлено на составление управляющих алгоритмов для собранных моделей. Учащиеся получают представление об особенностях составления программ управления, автоматизации механизмов, моделировании работы систем. Методические особенности реализации программы предполагают сочетание возможности развития индивидуальных творческих способностей и формирование умений взаимодействовать в коллективе, работать в группе. Программа предполагает возможность участия детей трёх возрастных групп. Ведущие типы деятельности детей среднего школьного возраста обуславливают включение их в коллективную творческую деятельность, использование таких педагогических технологий как обучение в сотрудничестве, проектные методы обучения, технологию использования в обучении игровых методов, информационно-коммуникационные технологии. Выполнение практических работ и подготовка к состязаниям роботов (проектирование, конструирование, программирование, испытание и запуск модели робота) требует консультирования педагога, тщательной подготовки и соблюдения правил техники безопасности. Поэтому есть необходимость в организации занятий по подгруппам с учётом индивидуальных особенностей детей разных возрастных категорий (младшая – 10-12 лет, средняя – 12-15 лет, старшая – 15-17 лет). Одно из двух занятий в объединении организуется по подгруппам.
Возраст детей, участвующих в реализации программы
Программа предусматривает занятия с учащимися 10-17 лет. Содержание программы предполагает, что дети уже знакомы с такими понятиями как: простые механизмы, у них развито элементарное конструкторское мышление, они понимают принципы работы многих механизмов.
Сроки реализации программы, режим занятий
Программа рассчитана 1 год обучения. Годовая нагрузка на ученика составляет 144 часа. Режим занятий соответствует нормам и требованиям САН ПиН: два раза в неделю по два академических часа с десятиминутным перерывом.
Формы и режимы занятий
При проведении занятий используются следующие формы работы:
лекционная (получение учащимися нового материала);
самостоятельная (ученики выполняют индивидуальные задания в течение части занятия или одного-двух занятий);
проектная деятельность (получение новых знаний, реализация личных проектов);
соревнования (практическое участие детей в разнообразных мероприятиях по техническому лего-конструированию).
Ожидаемые результаты и способы определения результативности
По окончании программы учащийся должен:
знать основы механики, автоматики и программирования в среде MINDSTORMS EV3 на языках EV3-G и Robolab;
уметь собирать модели, используя готовую схему сборки, а также по эскизу;
уметь создавать собственные проекты и при необходимости программировать роботизированные модели.
Предъявляемым результатом будет:
Осуществление сборки не менее 5 моделей роботов;
Создание не менее двух индивидуальных конструкторских проектов;
Создание коллективного выставочного проекта;
Участие в соревнованиях и мероприятиях различного уровня.
Виды и формы контроля
Текущий контроль проходит в виде состязаний или выставки роботов, оцениваемых по технологическим картам.
Итоговый контроль по темам проходит в виде состязаний роботов на ежемесячных мероприятиях, проводимых Ассоциацией развития робототехники Красноярского края. Соревнования включают в себя проектирование, создание и программирование робота, способного выполнить поставленные задачи. Результаты контроля фиксируются в протоколах состязаний. По каждому параметру разработаны критерии.
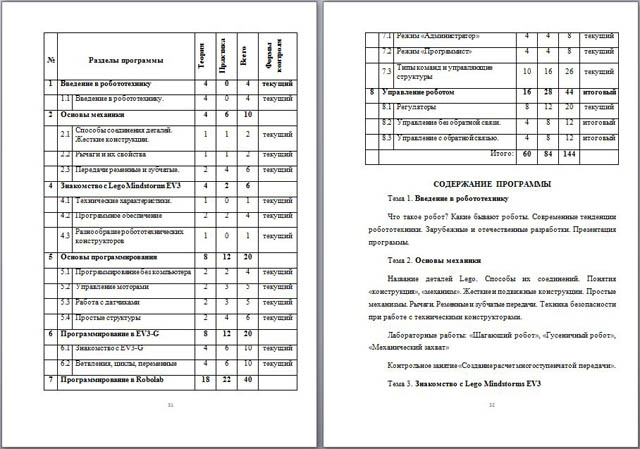
УЧЕБНЫЙ ПЛАН
| № | Разделы программы | Теория | Практика | Всего |
-
| Введение в робототехнику | 4 | 0 | 4 |
-
| Основы механики | 4 | 6 | 10 |
-
| Знакомство с Lego Mindstorms EV3 | 2 | 4 | 6 |
-
| Основы программирования | 8 | 12 | 20 |
-
| Программирование в EV3-G | 8 | 12 | 20 |
-
| Программирование в Robolab | 18 | 22 | 40 |
-
| Управление роботом | 16 | 28 | 44 |
| Итого: | 60 | 84 | 144 |
УЧЕБНО-ТЕМАТИЧЕСКИЙ ПЛАН
|
№ |
Разделы программы | Теория | Практика | Всего | Формы контроля |
| 1 | Введение в робототехнику | 4 | 0 | 4 | текущий |
|
| 1.1 | Введение в робототехнику. | 4 | 0 | 4 | текущий |
| 2 | Основы механики | 4 | 6 | 10 |
|
|
| 2.1 | Способы соединения деталей. Жесткие конструкции. | 1 | 1 | 2 | текущий |
|
| 2.2 | Рычаги и их свойства | 1 | 1 | 2 | текущий |
|
| 2.3 | Передачи ременные и зубчатые. | 2 | 4 | 6 | текущий |
| 4 | Знакомство с Lego Mindstorms EV3 | 4 | 2 | 6 |
|
|
| 4.1 | Технические характеристики. | 1 | 0 | 1 | текущий |
|
| 4.2 | Программное обеспечение | 2 | 2 | 4 | текущий |
|
| 4.3 | Разнообразие робототехнических конструкторов | 1 | 0 | 1 | текущий |
| 5 | Основы программирования | 8 | 12 | 20 |
|
|
| 5.1 | Программирование без компьютера | 2 | 2 | 4 | текущий |
|
| 5.2 | Управление моторами | 2 | 3 | 5 | текущий |
|
| 5.3 | Работа с датчиками | 2 | 3 | 5 | текущий |
|
| 5.4 | Простые структуры | 2 | 4 | 6 | текущий |
| 6 | Программирование в EV3-G | 8 | 12 | 20 |
|
|
| 6.1 | Знакомство с EV3-G | 4 | 6 | 10 | текущий |
|
| 6.2 | Ветвления, циклы, переменные | 4 | 6 | 10 | текущий |
| 7 | Программирование в Robolab | 18 | 22 | 40 |
|
|
| 7.1 | Режим «Администратор» | 4 | 4 | 8 | текущий |
|
| 7.2 | Режим «Программист» | 4 | 4 | 8 | текущий |
|
| 7.3 | Типы команд и управляющие структуры | 10 | 16 | 26 | текущий |
| 8 | Управление роботом | 16 | 28 | 44 | итоговый |
|
| 8.1 | Регуляторы | 8 | 12 | 20 | текущий |
|
| 8.2 | Управление без обратной связи. | 4 | 8 | 12 | итоговый |
|
| 8.3 | Управление с обратной связью. | 4 | 8 | 12 | итоговый |
|
| Итого: | 60 | 84 | 144 |
|
СОДЕРЖАНИЕ ПРОГРАММЫ
Тема 1. Введение в робототехнику
Что такое робот? Какие бывают роботы. Современные тенденции робототехники. Зарубежные и отечественные разработки. Презентация программы.
Тема 2. Основы механики
Название деталей Lego. Способы их соединений. Понятия «конструкция», «механизм». Жесткие и подвижные конструкции. Простые механизмы. Рычаги. Ременные и зубчатые передачи. Техника безопасности при работе с техническими конструкторами.
Лабораторные работы: «Шагающий робот», «Гусеничный робот», «Механический захват»
Контрольное занятие «Создание расчет многоступенчатой передачи».
Тема 3. Знакомство с Lego Mindstorms EV3
Технические характеристики. Память, быстродействие. Порты. Кнопки. Элементы питания. Программные среды. Другие робототехнические конструкторы.
Тема 4. Основы программирования
Программирование средствами EV3. Возможности управления моторами. Датчики. Использование датчиков для управления роботом. Основные структуры программирования.
Лабораторные работы: «Управление моторами», «Управляемая тележка», «Использование датчиков для управления роботом», «Робот-змея».
Контрольное занятие «Робот-сигвей»
Тема 5. Программирование в EV3-G.
Язык программирования EV3-G. Окно программы. Палитра команд. Ветвления. Циклы. Переменные. Стандартные модели: Манипулятор, Скорпион, Андроид.
Лабораторные работы: Манипулятор, Скорпион, Андроид.
Контрольное занятие «Движение по линии с использованием релейного регулятора»
Тема 6. Программирование в Robolab
Язык программирования Robolab. Режимы «Администратор» и «Программист». Основные окна. Готовые примеры программ. Типы команд. Команды действия. Базовые команды. Моторы. Продвинутое управление моторами. Команды ожидания: интервалов времени, показаний датчиков, значений контейнеров, значений таймера. Управляющие структуры. Задачи и подпрограммы. Ветвления. Прыжки. Циклы. Параллельные задачи. События. Модификаторы. Операции с выражениями. Библиотеки пользователя.
Лабораторные работы: «Продвинутое управление моторами», «Синхронизация моторов», «Подсчет перекрестков»
Контрольное занятие « модель Color Sorter»
Тема 7. Управление роботом
Управление моторами. Использование датчиков. Регуляторы: релейный, пропорциональный, дифференциальный, интегральный. Движение по линии, Движение вдоль стены. Управление без обратной связи. Управление с обратной связью. Точные перемещения. Защита от застреваний. Объезд препятствий. Фильтрация данных. Удаленное управление. Кодирование передачи данных. Управление в пошаговом режиме. Обмен данными.
Лабораторные работы: «Кегельринг», «Робот-барабанщик», «Объезд препятствий», «Движение вдоль стены», «Обмен данными между роботами»,
Контрольное занятие «Маленький исследователь»
Список соревнований
«FIRST», «Робо-регби», «Робо-суммо», WRO, «Манипуляторы», «Траектория», «Робот-альпинист», «Парковщик»
3.Технологические карты
Тема 2. Основы механики
Лабораторные работы: «Шагающий робот», «Гусеничный робот», «Механический захват»
Контрольное занятие «Создание расчет многоступенчатой передачи».
Карточка № 1 для оценивания моделей (раздел «Механика»)
| № | Наименование критерия | Оценка (макс. 5 баллов) |
-
| Эффективность выбора конструкции модели под поставленную задачу (жесткость, подвижность) |
|
-
| Использование рычагов (1, 2, 3 рода) |
|
-
| Использование передач (ременные, зубчатые, цепные, повышающие, понижающие) |
|
-
| Достижение максимального передаточного соотношения при одинаковом количестве используемых деталей |
|
-
| Максимальная грузоподъемность и количество степеней свободы |
|
-
| Правильность соединения деталей |
|
-
| Сложность конструкции |
|
-
| Полнота выполнения задачи |
|
Тема 4. Основы программирования
Лабораторные работы: «Управление моторами», «Управляемая тележка», «Использование датчиков для управления роботом», «Робот-змея».
Контрольное занятие «Робот-сигвей»
Карточка № 2 для оценивания моделей (раздел «Основы программирования»)
| № | Наименование критерия | Оценка (макс. 5 баллов) |
-
| Правильность использования языка программирования |
|
-
| Эффективность использования алгоритмических конструкций |
|
-
| Управление моторами (направление, мощность) |
|
-
| Оптимальное использование различных типов датчиков (касания, освещенности, цвета, расстояния) |
|
-
| Точность и полнота выполнения задачи |
|
Тема 5. Программирование в EV3-G.
Лабораторные работы: Манипулятор, Скорпион, Андроид.
Контрольное занятие «Движение по линии с использованием релейного регулятора»
Карточка № 3 для оценивания моделей (раздел «Программирование в EV3-G»)
| № | Наименование критерия | Оценка (макс. 5 баллов) |
-
| Правильность использования языка программирования |
|
-
| Оптимальное использование различных типов датчиков (касания, освещенности, цвета, расстояния) |
|
-
| Использование захватов и манипуляторов. |
|
-
| Точность и полнота выполнения задачи |
|
Тема 6. Программирование в Robolab
Язык программирования Robolab. Режимы «Администратор» и «Программист». Основные окна. Готовые примеры программ. Типы команд. Команды действия. Базовые команды. Моторы. Продвинутое управление моторами. Команды ожидания: интервалов времени, показаний датчиков, значений контейнеров, значений таймера. Управляющие структуры. Задачи и подпрограммы. Ветвления. Прыжки. Циклы. Параллельные задачи. События. Модификаторы. Операции с выражениями. Библиотеки пользователя.
Лабораторные работы: «Продвинутое управление моторами», «Синхронизация моторов», «Подсчет перекрестков»
Контрольное занятие « модель Color Sorter»
Карточка № 3 для оценивания моделей (раздел «Программирование в Robolab»)
| № | Наименование критерия | Оценка (макс. 5 баллов) |
-
| Правильность использования языка программирования |
|
-
| Эффективность использования алгоритмических конструкций (ветвление, цикл, подпрограммы) |
|
-
| Эффективность использования различных команд |
|
-
| Использование захватов и манипуляторов. |
|
-
| Точность и полнота выполнения задачи |
|
Тема 7. Управление роботом
Управление моторами. Использование датчиков. Регуляторы: релейный, пропорциональный, дифференциальный, интегральный. Движение по линии, Движение вдоль стены. Управление без обратной связи. Управление с обратной связью. Точные перемещения. Защита от застреваний. Объезд препятствий. Фильтрация данных. Удаленное управление. Кодирование передачи данных. Управление в пошаговом режиме. Обмен данными.
Лабораторные работы: «Кегельринг», «Робот-барабанщик», «Объезд препятствий», «Движение вдоль стены», «Обмен данными между роботами»,
Контрольное занятие «Маленький исследователь»
Карточка № 6 для оценивания модели (раздел «Управление роботом»)
| № | Наименование критерия | Оценка (макс. 5 баллов) |
-
| Правильность использования языка программирования |
|
-
| Эффективность использования алгоритмических конструкций |
|
-
| Эффективность использования различных команд |
|
-
| Эффективность управления роботом (различные типы регуляторов, обмен данными) |
|
-
| Точность и полнота выполнения задачи |
|
Заключение
Результатом моей курсовой работы является, разработанная мной и моим научным руководителем, дополнительная общеобразовательная программа по курсу «Робототехника» для детей среднего и старшего школьного возрастов с использованием конструкторов III поколения LEGO Education MINDSTROMS EV3.
Применение робототехнике в процессе обучения способствует не только умственному развитию ребёнка, но и формированию таких качеств как самостоятельность и работа в коллективе, а также развитию исследовательских навыков ученика.
Робототехника, как и вся наука не стоит на месте, она развивается и очень стремительно. А человек в свою очередь должен идти «в ногу со временем», иначе он просто не сможет развиваться в соответствии с требованиями окружающей среды. И кто как не учитель поможет это осуществить, ведь большую часть того времени, когда происходит адаптация к окружающему миру, каждый из нас проводит в школе, где учитель выступает в качестве проводника в жизнь.
Список литературы
Педагогический энциклопедический словарь / гл. ред. Б.М. Бим-Бад. - М. : Большая рос. энцикл., 2002. - 528 с. ;
Сластенин В.А. и др. Педагогика: Учеб. пособие для студ. высш. пед. учеб. заведений / В. А. Сластенин, И. Ф. Исаев, Е. Н. Шиянов; Под ред. В.А. Сластенина. - М.: Издательский центр "Академия", 2002. - 576 с.
Макаренко А. С. Сочинения: В 7 т. - М., 1957- 1958. - Т. 5. - С. 117.
LEGO Mindstorms Education EV3 - базовый набор // Образование в кубе // [Сайт] - Режим доступа: https://www.educube.ru/products/bazovyy-nabor-lego-mindstorms-education-ev3/
Lego Mindstorms Языки программирования // Энциклопедия роботов // [Сайт] - Режим доступа: http://robofoot.ru
Сергеев И.В. Экономика предприятия: Учебное пособие. 2-е изд., перераб. и доп. М.: Финансы и статистика, 2000. [Сайт] - Режим доступа: http://bibliotekar.ru/economika-predpriyatiya-5/62.htm
Красноярск, 2015 год
 Получите свидетельство
Получите свидетельство Вход
Вход













 Курсовая работа по информатике «Методика обучения детей робототехнике с использованием конструкторов III поколения LEGO Education MINDSTROMS EV3» (0.42 MB)
Курсовая работа по информатике «Методика обучения детей робототехнике с использованием конструкторов III поколения LEGO Education MINDSTROMS EV3» (0.42 MB)
 0
0 8766
8766 727
727 Нравится
0
Нравится
0




