 Получите свидетельство
Получите свидетельство Вход
Вход


Робототехника
Содержание:
- Определение
- Виды робототехники
- Компоненты роботов
- Системы управления
- Способы перемещения
- Три закона для робота
- Типы роботов
Робототехника опирается на электронику, механику, программирование.
- Робототе́хника — прикладная наука, занимающаяся разработкой автоматизированных технических систем.
Виды робототехники
- Строительная
- Промышленная
- Бытовая
- Авиационная
- Экстремальная
Основные компоненты роботов
- Двигатели постоянного тока;
- Шаговые электродвигатели;
- двигатели;
- Воздушные мышцы;
- Электроактивные полимеры;
- Эластичные нанотрубки;
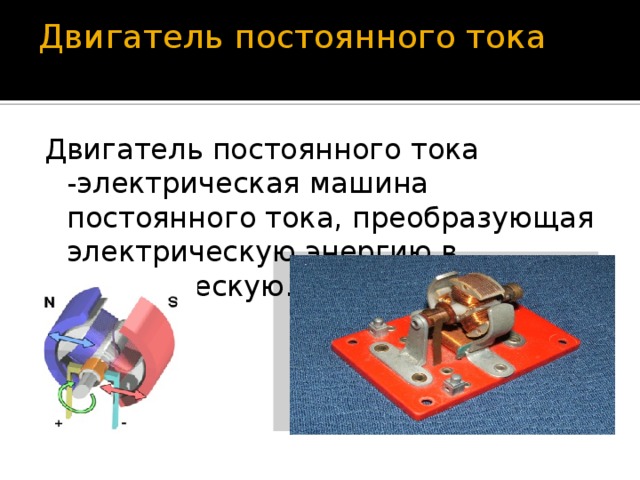
Двигатель постоянного тока
Двигатель постоянного тока -электрическая машина постоянного тока, преобразующая электрическую энергию в механическую.

Шаговый электродвигатель
- это синхронный электродвигатель с обмотками, в котором ток вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает угловые перемещения (шаги) ротора.
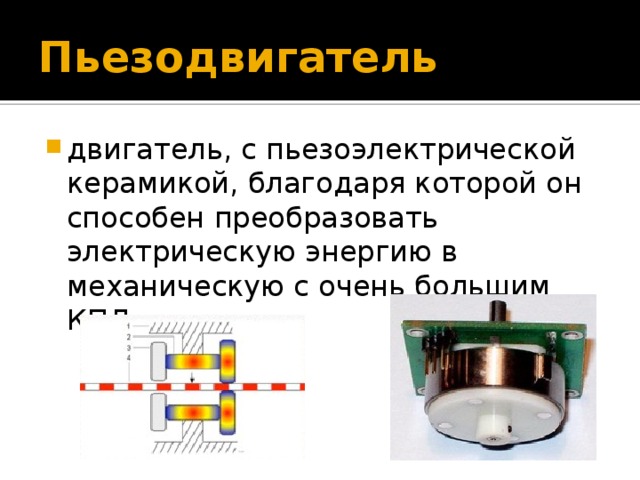
Пьезодвигатель
- двигатель, с пьезоэлектрической керамикой, благодаря которой он способен преобразовать электрическую энергию в механическую с очень большим КПД.
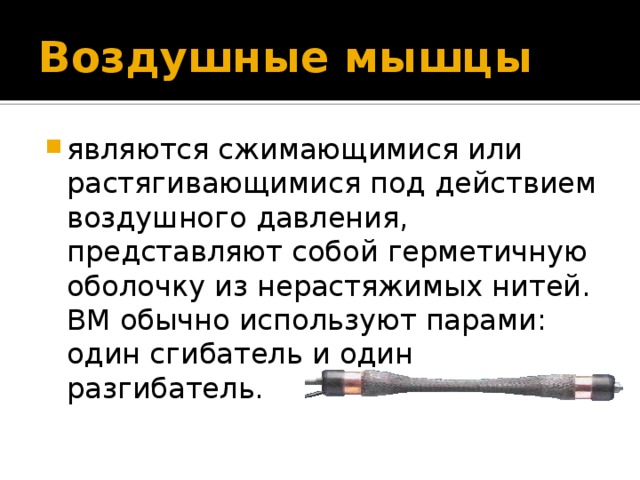
Воздушные мышцы
- являются сжимающимися или растягивающимися под действием воздушного давления, представляют собой герметичную оболочку из нерастяжимых нитей. ВМ обычно используют парами: один сгибатель и один разгибатель.
Электроактивные полимеры
- изменяют форму при приложении к ним напряжения. Они могут использоваться как двигатели, так и как сенсоры. Их часто называют искусственными мышцами.
Эластичные нанотрубки
- позволяют волокну эластично деформироваться, благодаря чему в будущем роботы смогут обгонять и перепрыгивать человека.

Биотехнические
Автоматические
Системы управления:
Интерактивные
Биотехнические системы управления
- командные (кнопочное и рычажное управление отдельными звеньями); копирующие (повтор движения человека, экзоскелеты); полуавтоматические (управление одним органом);
- командные (кнопочное и рычажное управление отдельными звеньями);
- копирующие (повтор движения человека, экзоскелеты);
- полуавтоматические (управление одним органом);

Автоматические системы управления:
- программные (решают однообразные задачи); адаптивные (решают типовые задачи, но адаптируются под условия); интеллектуальные (наиболее развитые автомат. системы);
- программные (решают однообразные задачи);
- адаптивные (решают типовые задачи, но адаптируются под условия);
- интеллектуальные (наиболее развитые автомат. системы);
Интерактивные системы управления
Различают три разновидности интерактивных систем управления:
- автоматизированные супервизорные диалоговые
- автоматизированные
- супервизорные
- диалоговые

Колёсные и гусеничные роботы
Летающие роботы
Шагающие роботы
Способы перемещения
Змееподобные роботы
Плавающие роботы
Роботы, перемещающиеся по вертикали

Три закона для робота
- Обязательные правила поведения для роботов, впервые сформулированные Айзеком Азимовым в рассказе «Хоровод» (1942).
Типы роботов
- Android
- Fighting robot
- Household robot
- Personal robot
- Industrial robot
- Social robot

Андро́ид — человекоподобный робот.
- 2009г.
Токио.
- 2007г.
Япония.

Боевой робот
- (или Военный робот ) —устройство, заменяющее человека для сохранения его жизни, в военных целях
- специальная боевая система наблюдения и разведки

Бытовой робот
— робот для помощи человеку в повседневной жизни и развлечений.
Персональный робот
- Персональный транспортный робот
— тип роботов, которые в отличие от других будут компактны, недороги и просты в использовании.
- Персональный робот-учитель иностранных языков.

Промышленный робот
— устройство, которое применяется для перемещения объектов и для выполнения производственных процессов.
- Сварочный робот
- Робот-хирург

Социальный робот
- Robovox робот
— Робот способный общаться с людьми. Или «устройство телеприсутствия».
- Робот - африканская мышка из Японии
Три закона для робота
- Законы гласят:
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам.
- Оригинальный текст (англ.)
- A robot may not injure a human being or, through inaction, allow a human being to come to harm.
- A robot must obey orders given it by human beings except where such orders would conflict with the First Law.
- A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.









 Виды робототехники (2.33 MB)
Виды робототехники (2.33 MB)
 0
0 3400
3400 44
44 Нравится
0
Нравится
0


