 Получите свидетельство
Получите свидетельство Вход
Вход


"кибернетика"
Фомичева Татьяна Владимировна
Учитель информатики МБОУ Лицей №11 г. Химки
Цель презентации:
Показать зарождение кибернетики, как науки
Познакомиться с современными кибернетическими моделями
Оглавление:
- Что такое кибернетика?
- Ученые внесшие вклад в развитие кибернетики
- Современные кибернетические модели
- «Черные ящики»
- Используемые материалы
Что такое кибернетика?
Кибернетика – наука, об общих закорномерностях процессов управления и передачи информации в машинах, живых организмах и обществе .
Схема управления
Ученые внесшие вклад в развитие кибернетики
- Платон
- Андре Мари Ампер
- Норберт Винер
- Аксель Берг
- Клод Шеннон
Это интересно
Платон
Впервые термин «кибернетика» предположительно был употреблён древнегреческим ученным Платоном в смысле искусства управления кораблём или колесницей.
В древности термин «кибернетика» использовался Платоном в контексте «исследования самоуправления» в «Законах», для обозначения управления людьми.
Это интересно
Андре Мари Ампер
Понятие «кибернетика» как научный термин введено в первой половине XIX века французским физиком Андре Мари Ампером, который назвал кибернетикой науку, занимающуюся изучением искусства управлении людьми, обществом.
В Древней Греции этого титула удостаивались лучшие мастера управления боевыми колесницами. В последствии слово «кибернетикос» было заимствовано римлянами – так в латинском языке появилось слово «губернатор» (управляющий провинцией).
Норберт Винер
Основоположником кибернетики считается выдающийся американский математик Норберт Винер, а датой её рождения – 1948 г., когда он опубликовал книгу «Кибернетика или управление и связь в животном и машине».
Цитата
« История века делается у нас на глазах. Мы с изумлением взираем на странные громады, выросшие на недавних пустырях, а затем быстро к ним привыкаем, обживаем их и спешим дальше, к новым стоэтажным небоскребам.»
Норберт Винер
Аксель Иванович Берг
В СССР инициатором и руководителем исследований по кибернетике был академик А́ксель Ива́нович Берг.
Он внес значительный вклад в становление в СССР технической кибернетики, искусственного интеллекта.
.
Клод Элвуд Шеннон
В 1952г. К.Э. Шеннон сконструировал кибернетическую модель, которой дал имя древне греческого героя Тезея , отыскавшего в лабиринте Миноса ( царя Крита) чудовище с головой быка и человеческим телом.
.
.
.
.
Мышь в лабиринте
«Мышь в лабиринте»
Тезей Шеннона представлял собой намагниченную стальную игрушку-мышь, ползающую по квадратной доске, разделенной на 25 квадратов произвольными перегородками. Управляемая телефонным реле и магнитом, находящимся под доской, мышка отыскивала выход из лабиринта.
Современные кибернетические модели
Объектом кибернетики являются все управляемые системы
Примеры кибернетических систем — автоматические регуляторы в технике, ЭВМ, человеческий мозг, биологические популяции, человеческое общество и др.
- Модели используемые в медицине
- Модели используемые в робототехнике
- Модели используемые в экономике
Модели используемые в медицине
- Искусственное сердце
- Кибернетический глаз
- Пижамы Exmobaby
- Шапка, помогающая думать
Модели используемые в робототехнике
- Робот-андроид
- Роботы-комары
- Кибернетический домашний питомец
- Робот- рыба
- Андроид-домохозяйка

Модели используемые в экономике
- Система управления проектами
Робот-андроид
Робот-андроид. Создан корпорацией Хонда, в Центре Фундаментальных Технических Исследований Вако (Япония). Рост 130 см, масса 54 кг. Способен передвигаться со скоростью быстро идущего человека — до 6 км/ч.

Система управления проектами

Роботы- комары
РОБОТЫ-КОМАРЫ.
Армия США принимает на вооружение новый вид вооружения, РОБОТОВ-КОМАРОВ. Вместо того чтобы бомбить врагов, теперь на них просто скинут небольшую емкость с десятком тысяч роботов-комаров. Каждый робот-комар будет находить человека в радиусе 100 метров от места выброса и впрыскивать ему под кожу сильнодействующий яд. Механизм поиска человеческого тела и механизм впрыска жидкости, ученые скопировали с обычных комаров.

Искусственное сердце
Искусственное сердце — представляет собой технологическое устройство, предназначенное для поддержания достаточных для жизнедеятельности параметров гемодинамики.
Искусственное сердце, пример биомедицинской инженерии.

Кибернетический глаз
По словам изобретателей, таким способом можно восстановить зрение у пациентов, страдающих пигментной дистрофией сетчатки либо возрастной дистрофией жёлтого пятна. Полностью восстановить таким образом зрение не удастся, однако вернуть пациентам способность ориентироваться в пространстве вполне возможно.

Кибернетический домашний питомец
Все модели разрабатываются так, чтобы быть похожими на настоящих домашних питомцев и максимально полно соответствовать выбранному прообразу как внешне, так и в действиях.
Однако в отличие от живых котов, собак и т.д. за ними не надо убирать, выгуливать. Любой кибер-питомец может быть запрограммирован для выполнения каких-либо дополнительных, не свойственных настоящим животным функциям.
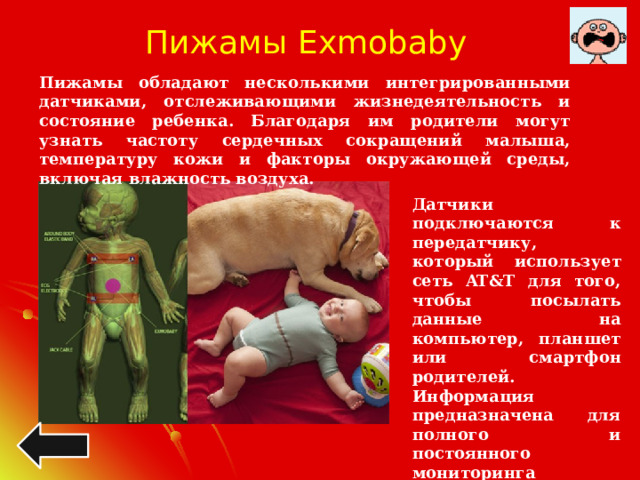
Пижамы Exmobaby
Пижамы обладают несколькими интегрированными датчиками, отслеживающими жизнедеятельность и состояние ребенка. Благодаря им родители могут узнать частоту сердечных сокращений малыша, температуру кожи и факторы окружающей среды, включая влажность воздуха.
Датчики подключаются к передатчику, который использует сеть AT&T для того, чтобы посылать данные на компьютер, планшет или смартфон родителей. Информация предназначена для полного и постоянного мониторинга состояния ребенка и оповещения, когда датчики предполагают, что ребенок нуждается в немедленном уходе.
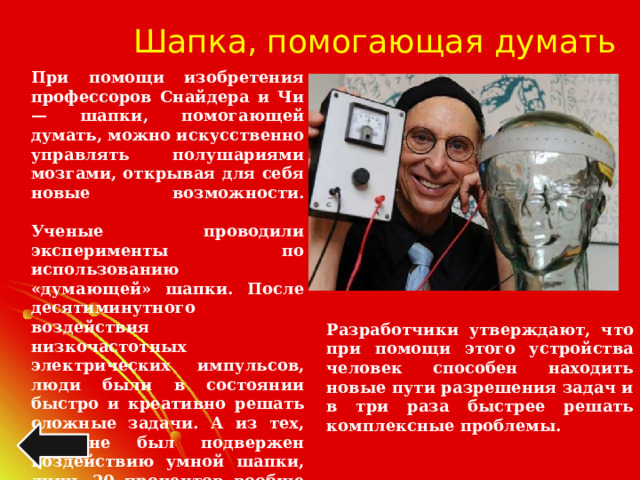
Шапка, помогающая думать
При помощи изобретения профессоров Снайдера и Чи — шапки, помогающей думать, можно искусственно управлять полушариями мозгами, открывая для себя новые возможности. Ученые проводили эксперименты по использованию «думающей» шапки. После десятиминутного воздействия низкочастотных электрических импульсов, люди были в состоянии быстро и креативно решать сложные задачи. А из тех, кто не был подвержен воздействию умной шапки, лишь 20 процентов вообще справились с задачей.
Разработчики утверждают, что при помощи этого устройства человек способен находить новые пути разрешения задач и в три раза быстрее решать комплексные проблемы.
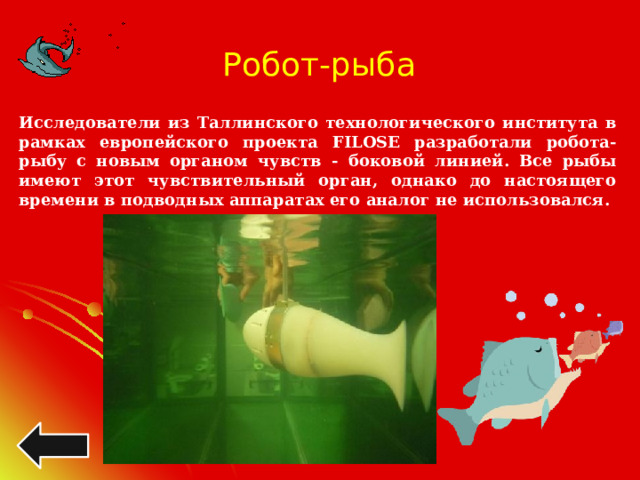
Робот-рыба
Исследователи из Таллинского технологического института в рамках европейского проекта FILOSE разработали робота-рыбу с новым органом чувств - боковой линией. Все рыбы имеют этот чувствительный орган, однако до настоящего времени в подводных аппаратах его аналог не использовался.

Андроид - домохозяйка
"Хозяйствующий" робот постирал рубашку в машине и вымыл пол шваброй. Случилось это на глазах почтенной публики 24 октября во время презентации андроида в Токийском университете (University of Tokyo), специалисты которого вместе с семью ведущими японскими компаниями представили промежуточный результат масштабного проекта по развитию роботов-помощников для поддержки стареющего населения.
Черные ящики
" Черный ящик" - логическая задача, в которой известны входные и выходные данные, но неизвестен алгоритм перевода входных данных в выходные. Разгадать "Черный ящик" - значит, определить алгоритм данного преобразования. Ответом будет результат выполнения алгоритма над заданными входными данными.
- Задача 1
- Задача 2
- Задача 3
- Задача 4
Интересные задачи на черные ящики

Задача 1
Результат F
№ наблюдения
Вход Х
Не могу
1
май
Не могу
save
2
16
33
3
64
129
4
Ответ:
Число умножается на 2 и к результату прибавляется 1
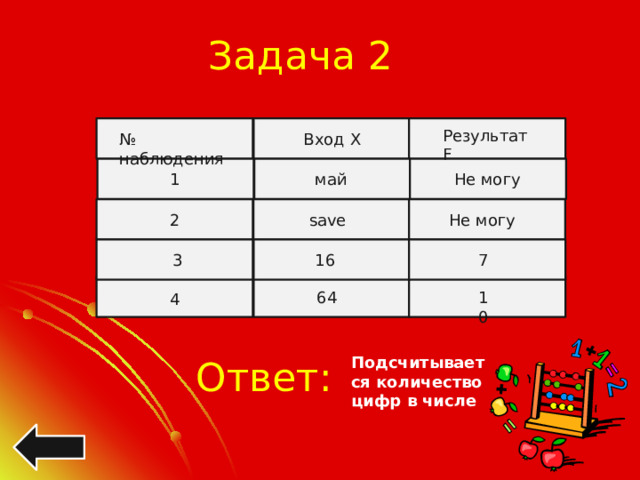
Задача 2
Результат F
№ наблюдения
Вход Х
Не могу
1
май
Не могу
save
2
16
7
3
64
10
4
Ответ:
Подсчитывается количество цифр в числе
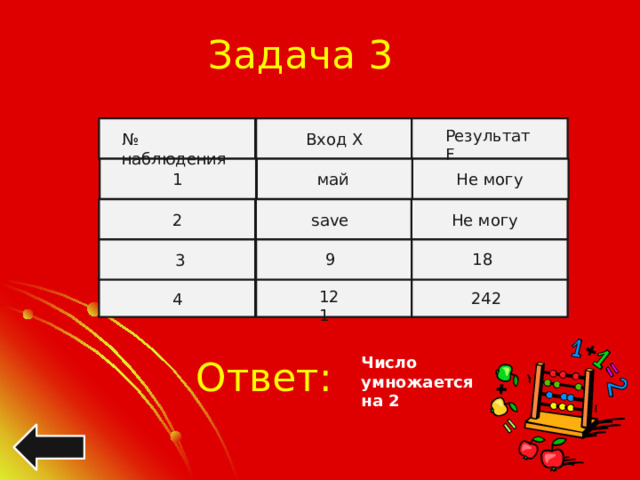
Задача 3
Результат F
Вход Х
№ наблюдения
Не могу
май
1
Не могу
save
2
9
18
3
121
242
4
Ответ:
Число умножается на 2
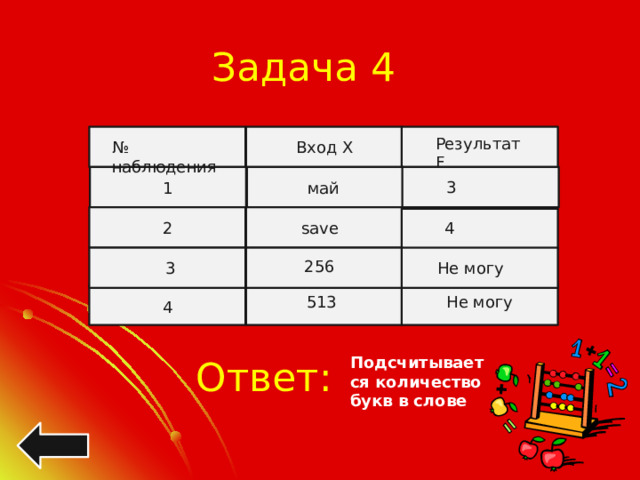
Задача 4
Результат F
№ наблюдения
Вход Х
3
май
1
4
2
save
256
3
Не могу
513
Не могу
4
Ответ:
Подсчитывается количество букв в слове

Используемые материалы
http://smiles.33bru.com
http://ru.wikipedia.org
http://images.yandex.ru
http://www.prorobot.ru/20.php

Спасибо за внимание

Модель управления с обратной связью
Управляющее
Управляющий объект
Управляемый объект
воздействие
Обратная связь
Управление – это целенаправленное взаимодействие объектов, одни из которых являются управляющими, а другие – управляемыми. В любом процессе управления всегда происходит взаимодействие 2-х двух объектов – управляющего и управляемого, которые coединены каналами прямой и обратной связи. По каналу прямой связи передаются управляющие сигналы, а по каналу обратной связи – информация о состоянии управляемого объекта.









 Презентация Кибернетика (3.52 MB)
Презентация Кибернетика (3.52 MB)
 0
0 1327
1327 16
16 Нравится
0
Нравится
0






