 Получите свидетельство
Получите свидетельство Вход
Вход



Электрические машины:
Двигатели постоянного тока
Ермакин Владислав Иванович
преподаватель спецдисциплин энергетического техникума им. Ф. В. Чижова (Кострома)
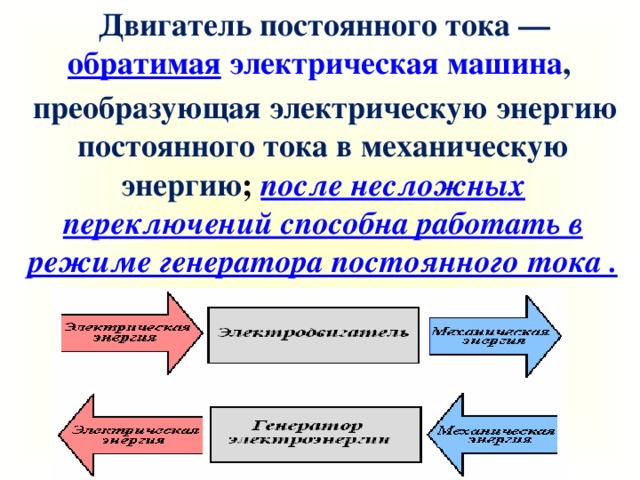
Двигатель постоянного тока — обратимая электрическая машина ,
преобразующая электрическую энергию постоянного тока в механическую энергию ; после несложных переключений способна работать в режиме генератора постоянного тока .

Конструкция машин постоянного тока
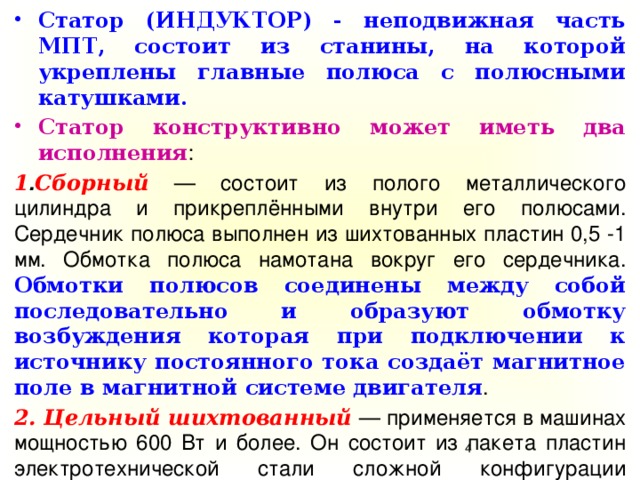
- Статор (ИНДУКТОР) - неподвижная часть МПТ, состоит из станины, на которой укреплены главные полюса с полюсными катушками.
- Статор конструктивно может иметь два исполнения :
1 . Сборный — состоит из полого металлического цилиндра и прикреплёнными внутри его полюсами. Сердечник полюса выполнен из шихтованных пластин 0,5 -1 мм. Обмотка полюса намотана вокруг его сердечника. Обмотки полюсов соединены между собой последовательно и образуют обмотку возбуждения которая при подключении к источнику постоянного тока создаёт магнитное поле в магнитной системе двигателя .
2. Цельный шихтованный — применяется в машинах мощностью 600 Вт и более. Он состоит из пакета пластин электротехнической стали сложной конфигурации толщиной 0,35 — 0,5 мм.
Главный полюс состоит из шихтованного сердечника (набранного, для уменьшения потерь мощности на вихревые токи , из отдельных пластин электротехнической стали, и прикреплённого болтами к станине), и ОБМОТКИ ВОЗБУЖДЕНИЯ , Обмотка возбуждения создает магнитный поток Ф машины. Сердечник имеет полюсный наконечник (для создания требуемого распределения магнитного потока). ОВ питается либо от независимого источника постоянного тока, либо включается параллельно (последовательно) зажимам якорной обмотки.
Якорь состоит из цилиндрического шихтованного сердечника (набранного из пластин электротехнической стали, в пазы которого уложена обмотка якоря), и коллектора . Закрепленный на валу двигателя коллектор состоит из ряда изолированных от вала и друг от друга медных пластин, к которым припаяны концы секций обмотки якоря. С помощью коллектора, и щеток осуществляется соединение обмотки якоря с внешней электрической цепью. У двигателей они, кроме того, служат для преобразования постоянного по направлению тока внешней цепи в изменяющийся по направлению ток в проводниках секций обмотки якоря. Дополнительные полюса с расположенной на них обмоткой уменьшают искрение между щетками и коллектором машины. Обмотку дополнительных полюсов соединяют последовательно с обмоткой якоря и на электрических схемах часто не изображают. Все обмотки изготовлены из изолированного обмоточного провода.
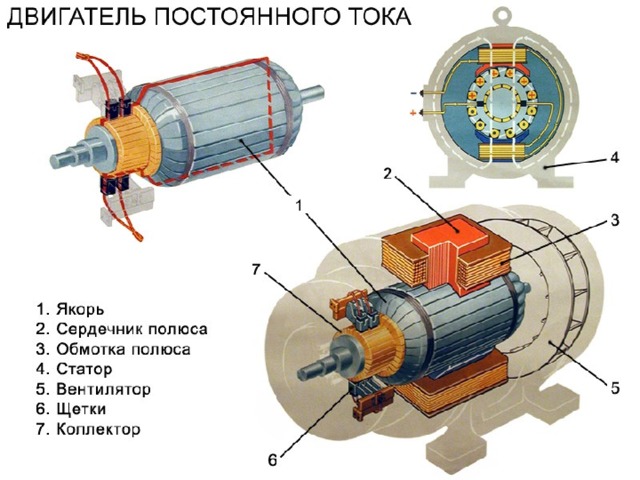
- Устройство коллекторных машин постоянного тока

Якорь ( подвижная часть МПТ ) состоит из вала, обмотки якоря, коллектора, двух подшипников и сердечника. Сердечник — это цилиндр собранный из штампованных отожжённых листов электротехнической стали толщиной 0,3-0,5 мм покрытых окисной плёнкой, либо электроизоляционным лаком. Такая сборная конструкция служит для уменьшения потерь на вихревые токи . В пазы сердечника вложены пазовые части обмотки якоря.
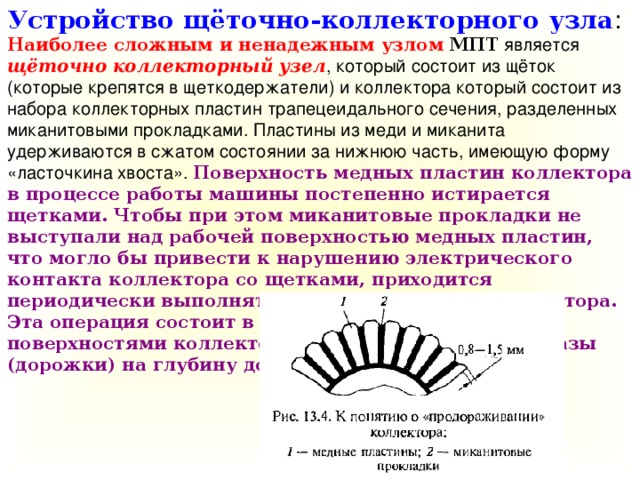
Устройство щёточно-коллекторного узла :
Наиболее сложным и ненадежным узлом МПТ является щёточно коллекторный узел , который состоит из щёток (которые крепятся в щеткодержатели) и коллектора который состоит из набора коллекторных пластин трапецеидального сечения, разделенных миканитовыми прокладками. Пластины из меди и миканита удерживаются в сжатом состоянии за нижнюю часть, имеющую форму «ласточкина хвоста». Поверхность медных пластин коллектора в процессе работы машины постепенно истирается щетками. Чтобы при этом миканитовые прокладки не выступали над рабочей поверхностью медных пластин, что могло бы привести к нарушению электрического контакта коллектора со щетками, приходится периодически выполнять «продораживание» коллектора. Эта операция состоит в том, что между рабочими поверхностями коллекторных пластин фрезеруют пазы (дорожки) на глубину до 1,5 мм.
Способы возбуждения машин постоянного тока (способ включения обмотки возбуждения)
- независимого возбуждения (ОВ подключается к постороннему источнику постоянного тока) – рис. а ;
- параллельного возбуждения (ОВ подключается параллельно ОЯ; шунтовая обмотка) – рис. б ;
- последовательного возбуждения (ОВ подключается последовательно ОЯ; сериесная обмотка) – рис. в ;
- смешанного возбуждения – МПТ конструктивно выполнена с двумя обмотками: одна из которых – шунтовая , другая - сериесная (обмотки возбуждения могут включаться согласно или встречно) рис. г .
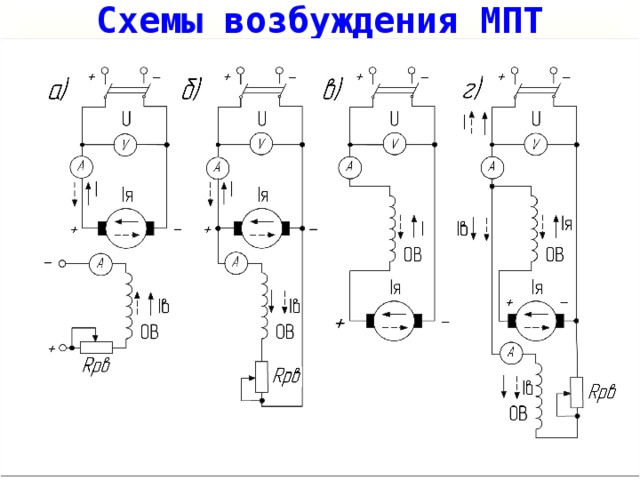
Схемы возбуждения МПТ
Способы пуска двигателя постоянного тока
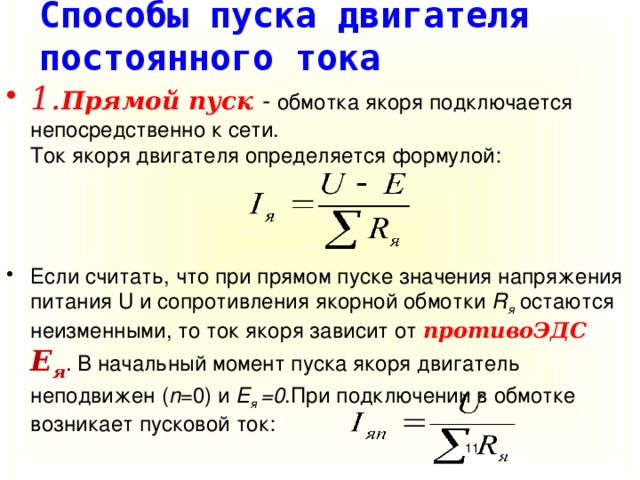
- 1. Прямой пуск - обмотка якоря подключается непосредственно к сети. Ток якоря двигателя определяется формулой:
- Если считать, что при прямом пуске значения напряжения питания U и сопротивления якорной обмотки R я остаются неизменными, то ток якоря зависит от противоЭДС Е я . В начальный момент пуска якоря двигатель неподвижен ( n =0) и Е я =0 .При подключении в обмотке возникает пусковой ток:
Прямой пуск
- Обычно сопротивление якоря (R я ) невелико, особенно у двигателей большой мощности, поэтому значение пускового тока достигает значений в 10 - 20 раз превышающих номинальный ток двигателя, что недопустимо. При этом возникают перегрузки в электроустановках и питающих кабелях, создается опасность поломки вала машины и появляется сильное искрение в щёточно-коллекторном узле. По этой причине прямой пуск применяется только для двигателей малой мощности, у которых R я относительно велико.
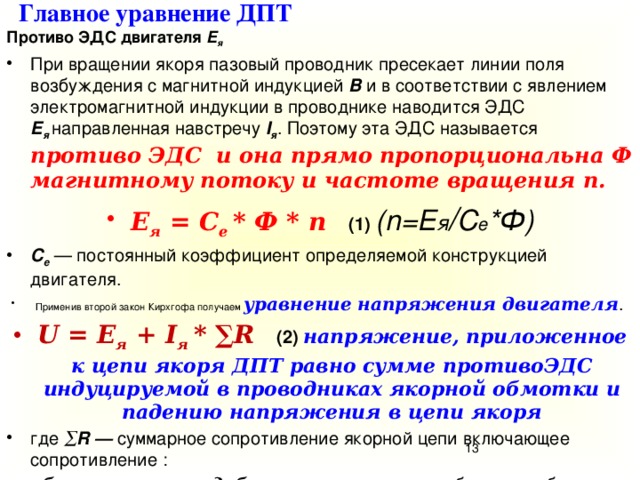
Главное уравнение ДПТ
Противо ЭДС двигателя E я
- При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС E я направленная навстречу I я . Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
- E я = С е * Ф * n (1) (n=E я / С е *Ф)
- C e — постоянный коэффициент определяемой конструкцией двигателя.
- Применив второй закон Кирхгофа получаем уравнение напряжения двигателя .
- U = E я + I я * ∑R (2) напряжение, приложенное к цепи якоря ДПТ равно сумме противоЭДС индуцируемой в проводниках якорной обмотки и падению напряжения в цепи якоря
- где ∑R — суммарное сопротивление якорной цепи включающее сопротивление :
- обмотки якоря, добавочных полюсов, обмотки возбуждения (для двигателей с последовательным возбуждением)
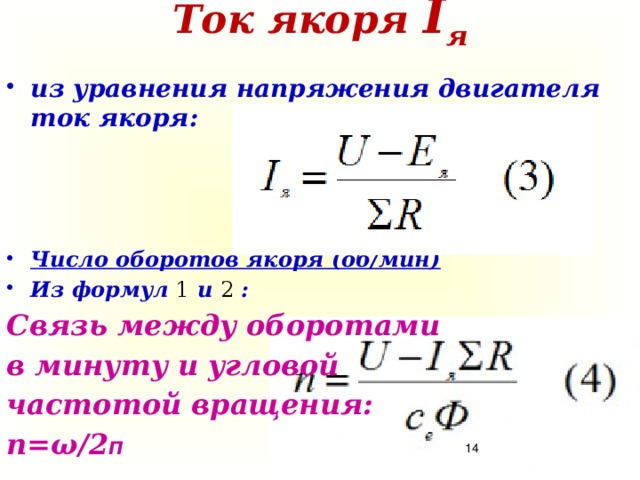
Ток якоря I я
- из уравнения напряжения двигателя ток якоря:
- Число оборотов якоря (об/мин)
- Из формул 1 и 2 :
Связь между оборотами
в минуту и угловой
частотой вращения:
n=ω/2 П
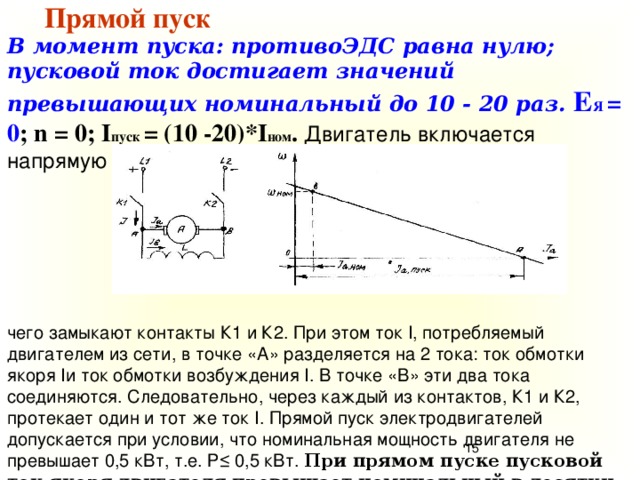
Прямой пуск
В момент пуска: противоЭДС равна нулю; пусковой ток достигает значений превышающих номинальный до 10 - 20 раз. E Я = 0 ; n = 0; I пуск = (10 -20)*I ном . Двигатель включается напрямую в сеть, для
чего замыкают контакты К1 и К2. При этом ток I, потребляемый двигателем из сети, в точке «А» разделяется на 2 тока: ток обмотки якоря Iи ток обмотки возбуждения I. В точке «В» эти два тока соединяются. Следовательно, через каждый из контактов, К1 и К2, протекает один и тот же ток I. Прямой пуск электродвигателей допускается при условии, что номинальная мощность двигателя не превышает 0,5 кВт, т.е. Р≤ 0,5 кВт. При прямом пуске пусковой ток якоря двигателя превышает номинальный в десятки раз.
Реостатный пуск
- способ пуска ДПТ с помощью введения дополнительного сопротивления в цепь якоря. При этом пусковой ток будет равен:
- Т. о., можно добиться величины пускового тока, диапазоне, безопасном для двигателя. Добавочное сопротивление может быть как в виде реостата, так и в виде нескольких резисторов. Это нужно для того, чтобы в процессе запуска двигателя, менять сопротивление в якорной цепи.
- С дополнительным сопротивлением в цепи якоря двигатель работает на мягкой искусственной характеристике, которая не соответствует нормальной работе двигателя.
- Пуск двигателя осуществляется в несколько ступеней. После некоторого разгона двигателя, Е пр ограничит ток, а следовательно пусковой момент, чтобы поддержать его на прежнем уровне, нужно уменьшить сопротивление, то есть переключить реостат или шунтировать резистор.
При четырёх ступенях разгона механическая характеристика будет выглядеть следующим образом:
На первой ступени, когда добавочное сопротивление максимально и равно R 1 +R 2 +R 3 двигатель начинает свой разгон. После достижения определенной точки, которую получают с помощью расчетных данных, сопротивление R 3 шунтируют. При этом двигатель переходит на новую характеристику, и разгоняется на ней все до той же точки. Таким образом, двигатель выходит на естественную характеристику, не пострадав от действия больших пусковых токов и моментов.
Пуск при пониженном напряжении
Для того чтобы осуществить пуск на пониженном напряжении, между питающей сетью и электрическим двигателем должен находится источник регулируемого напряжения, например: система «генератор-двигатель», либо источник постоянного тока со схемой электронной регулировки напряжения на выходе, либо ЛАТР (лабораторный автотрансформатор).
Применяется такой способ пуска для двигателей большой мощности, т.к. использование пускового реостата для пуска таких двигателей вызывает значительные потери энергии (на нагрев реостата пусковым током). При этом способе пуска отсутствуют броски тока в цепи якоря. Пуск плавный. В механической части электрического привода отсутствуют удары, но такой способ пуска очень дорогостоящий, так как стоимость источника регулируемого напряжения соизмерима со стоимостью ДПТ.
Двигатель с параллельным возбуждением
Частота вращения двигателя постоянного тока с независимым возбуждением описывается формулой ниже. Это выражение является электромеханической характеристикой ДПТ:
U – питающее напряжение сети;
I я – ток протекающий в якорной обмотке;
R я – сопротивление якорной цепи;
k – конструктивный коэффициент;
Ф – магнитный поток.
Если подставить формулу момента в выражение частоты вращения, то мы получим электромеханическую характеристику, выраженную через момент:
Если подставить формулу момента в выражение частоты вращения, то мы получим электромеханическую характеристику, выраженную через
момент:
Характерной особенностью этого двигателя является то, что ток возбуждения I в не зависит от нагрузки (тока якоря).
Реостат в цепи возбуждения r р г служит для регулирования тока возбуждения I в , -т.е. магнитного потока главных полюсов.

Уравнение электромеханической характеристики
- Уравнения электромеханической ω=f(I я ) и механической ω=f(M эм. ) характеристик могут быть найдены из уравнения равновесия ЭДС и напряжений для якорной цепи ДПТ : электромеханическая характеристика: ω=(U я-I я * (R я+R д))/ С е* Ф ; уравнение механической характеристики :
- ω=U я / С е* Ф – ( R я + R д )/( С е* Ф) 2 )M эм .
- При реостатном
- пуске двигателя,
- пусковой ток
- ограничивают
- введением
- добавочного
- сопротивления
- в якорную цепь
- двигателя.
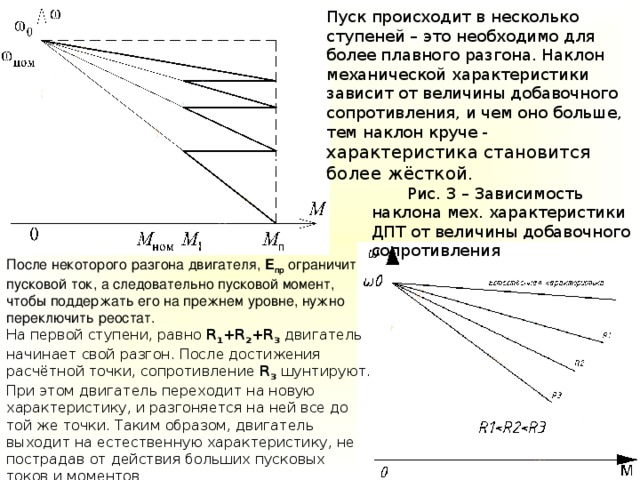
Пуск происходит в несколько ступеней – это необходимо для более плавного разгона. Наклон механической характеристики зависит от величины добавочного сопротивления, и чем оно больше, тем наклон круче - характеристика становится более жёсткой.
Рис. 3 – Зависимость наклона мех. характеристики ДПТ от величины добавочного сопротивления
После некоторого разгона двигателя, Е пр ограничит пусковой ток, а следовательно пусковой момент, чтобы поддержать его на прежнем уровне, нужно переключить реостат.
На первой ступени, равно R 1 +R 2 +R 3 двигатель начинает свой разгон. После достижения расчётной точки, сопротивление R 3 шунтируют. При этом двигатель переходит на новую характеристику, и разгоняется на ней все до той же точки. Таким образом, двигатель выходит на естественную характеристику, не пострадав от действия больших пусковых токов и моментов
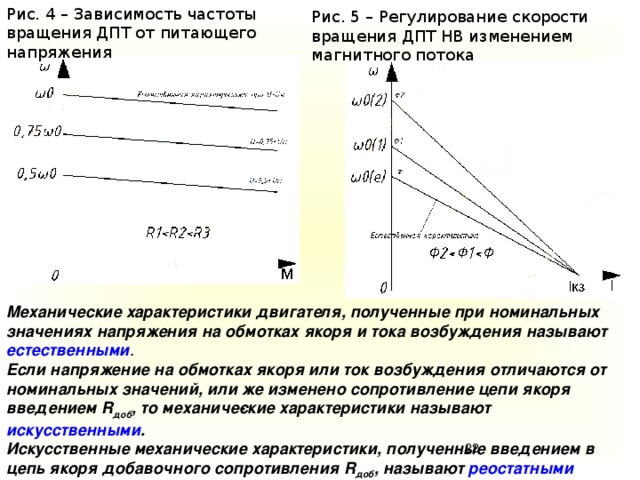
Рис. 4 – Зависимость частоты вращения ДПТ от питающего напряжения
Рис. 5 – Регулирование скорости вращения ДПТ НВ изменением магнитного потока
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и тока возбуждения называют естественными .
Если напряжение на обмотках якоря или ток возбуждения отличаются от номинальных значений, или же изменено сопротивление цепи якоря введением R доб , то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления R доб , называют реостатными
Способы регулирования частоты вращения (числа оборотов; n, об./мин.)
- реостатный – изменением суммарного сопротивления якорной цепи (включением в цепь якоря дополнительных реостатов – сопротивлений) ;
- полюсный – изменением магнитного потока создаваемого полюсами машины (изменением тока возбуждения);
- якорный – изменением величины напряжения, питания якорной цепи ДПТ.
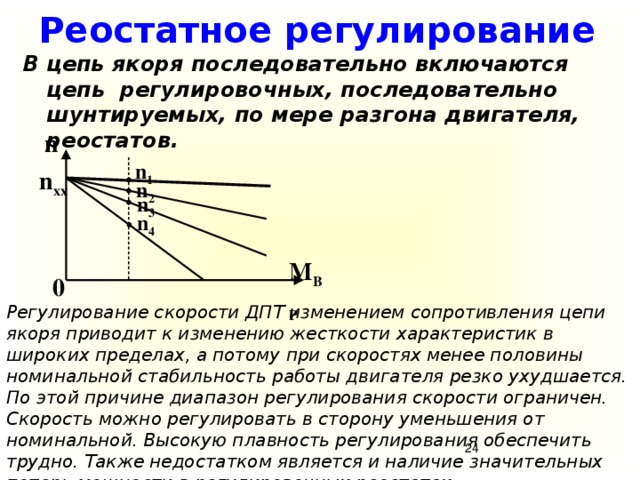
Реостатное регулирование
В цепь якоря последовательно включаются цепь регулировочных, последовательно шунтируемых, по мере разгона двигателя, реостатов.
n
n 1
n хх
n 2
n 3
n 4
M ВР
0
Регулирование скорости ДПТ изменением сопротивления цепи якоря приводит к изменению жесткости характеристик в широких пределах, а потому при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен. Скорость можно регулировать в сторону уменьшения от номинальной. Высокую плавность регулирования обеспечить трудно. Также недостатком является и наличие значительных потерь мощности в регулировочных реостатах.
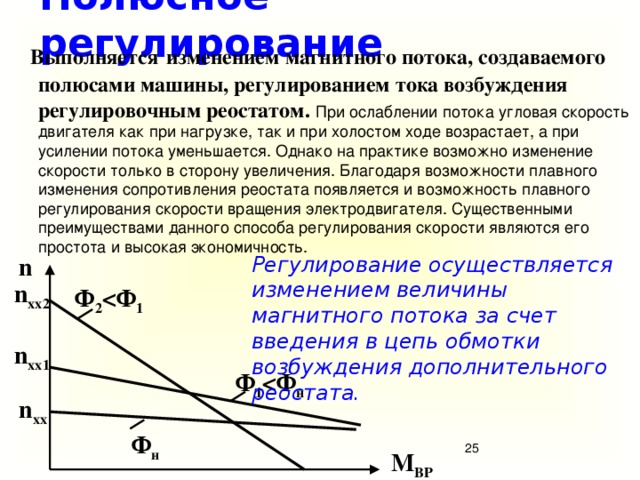
Полюсное регулирование
Выполняется изменением магнитного потока, создаваемого полюсами машины, регулированием тока возбуждения регулировочным реостатом. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока уменьшается. Однако на практике возможно изменение скорости только в сторону увеличения. Благодаря возможности плавного изменения сопротивления реостата появляется и возможность плавного регулирования скорости вращения электродвигателя. Существенными преимуществами данного способа регулирования скорости являются его простота и высокая экономичность.
Регулирование осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата.
n
n хх2
Ф 2 1
n хх1
Ф 1 н
n хх
Ф н
24
M ВР
- Если нагрузка на валу больше номинальной, применять полюсное регулирование нельзя, т.к. с уменьшением потока Ф ток якоря превысит номинальный.
- Использование полюсного регулирования допустимо лишь для увеличения частоты вращения.
- Регулировки током возбуждения экономичны и технологически просты, т.к. О бмотка В озбуждения ( ОВ ) у МПТ – слаботочная цепь управления.
25
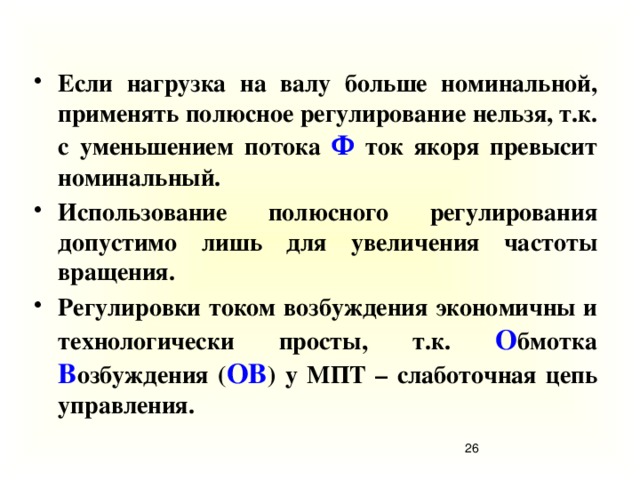
Якорное регулирование
возможно только при независимом способе возбуждения машины, т.к. при параллельном возбуждении одновременно изменялся бы и поток Ф , что привело бы к изменению I я , а не n .
От ИРН с переменной полярностью на якорную цепь ДНВ питается напряжением постоянного тока регулируемым от нуля до U н и обратно. Пусковой реостат, при таком способе пуска, не нужен, т.к. пуск начинается с малого напряжения.
Изменение питающего напряжения якоря для ДПТ НВ обеспечивает регулировку частоты вращения вниз от номинальной. Этот способ осуществляют с помощью управляемого тиристорного выпрямителя (рис. а ) или с помощью транзисторного преобразователя (рис. б)
25
Задача управления двигателем в основном сводится к регулированию частоты вращения . Реже встречается задача управления моментом двигателя. Изменение частоты вращения может достигаться тремя способами: включением реостата Rр в цепь якоря (реостатное регулирование); изменением магнитного потока Φ (полюсное регулирование); изменением подводимого к якорю напряжения (якорное регулирование).
Изменение характеристик при регулировке частоты вращения ДПТ с помощью: а – Ф (параллельное возбуждение); б – Ф или U якоря (последовательное возбуждение); в – U якоря (независимое возбуждение)
Способ регулирования скорости изменением напряжения , подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю.
При этом следует отметить, что все регулировочные характеристики являются жесткими, а степень их жесткости остается неизменной. Таким образом, работа двигателя является стабильной на всех угловых скоростях, и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Более того, угловую скорость можно уменьшать и увеличивать относительно номинальной. Также достаточно просто обеспечить и плавное регулирование частоты вращения электродвигателя: для этого достаточно плавно изменять напряжение постоянного тока.
Этот вариант регулирования является наиболее экономичным, поскольку регулирование угловой скорости двигателя постоянного тока независимого возбуждения осуществляется без дополнительных потерь мощности в силовой цепи якоря.
25
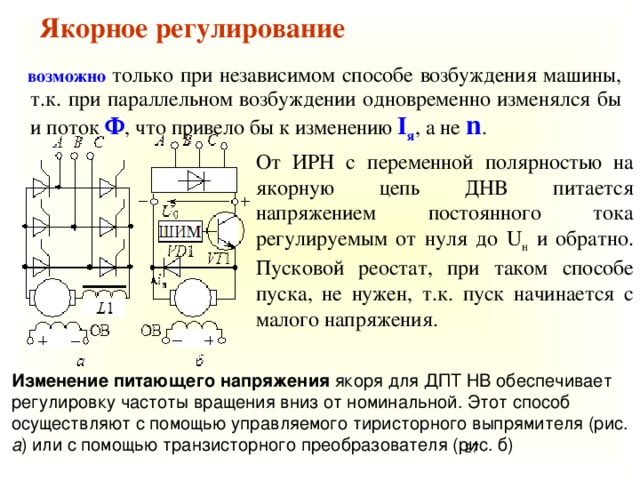
Двигатель с последовательным возбуждением
Характерной особенностью ДПТ ПВ является
то, что в них ток возбуждения равен току якоря ,
в результате чего основной магнитный поток при изменениях нагрузки также изменяется .
M=С*I 2
Способность ДПТ ПВ развивать большой электромагнитный момент, пропорциональный квадрату тока якоря, обеспечивает им хорошие пусковые свойства, т. е. большой пусковой момент при малом токе якоря. Поэтому такие двигатели применяют в грузоподъёмных, тяговых (электротранспорте) приводах. При уменьшении нагрузки ДПТ ПВ частота вращения резко возрастает и при нагрузке меньше 25% от номинальной может достигнуть опасных значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима. Регулирование скорости вращения производится теми же способами, что и для ДПТ с параллельным возбуждением.
Механические характеристики ДПТ с последовательным возбуждением
Зависимость электромагнитного момента М
от тока нагрузки М=f(I)
25
M ВР
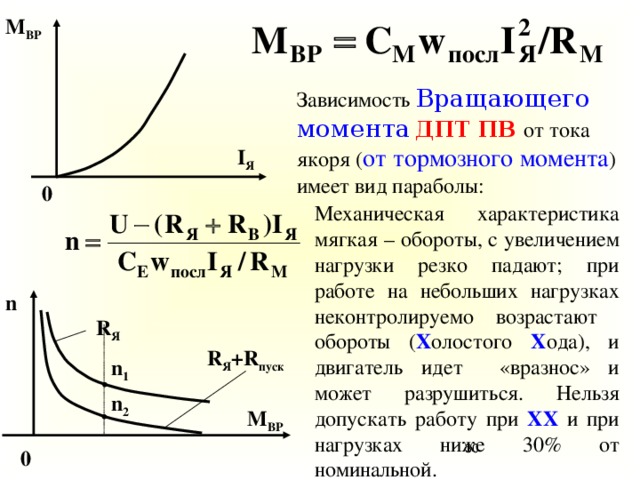
Зависимость Вращающего момента ДПТ ПВ от тока якоря ( от тормозного момента ) имеет вид параболы:
I Я
0
Механическая характеристика мягкая – обороты, с увеличением нагрузки резко падают; при работе на небольших нагрузках неконтролируемо возрастают обороты ( Х олостого Х ода), и двигатель идет «вразнос» и может разрушиться. Нельзя допускать работу при ХХ и при нагрузках ниже 30% от номинальной.
n
R Я
R Я +R пуск
n 1
n 2
M ВР
25
0
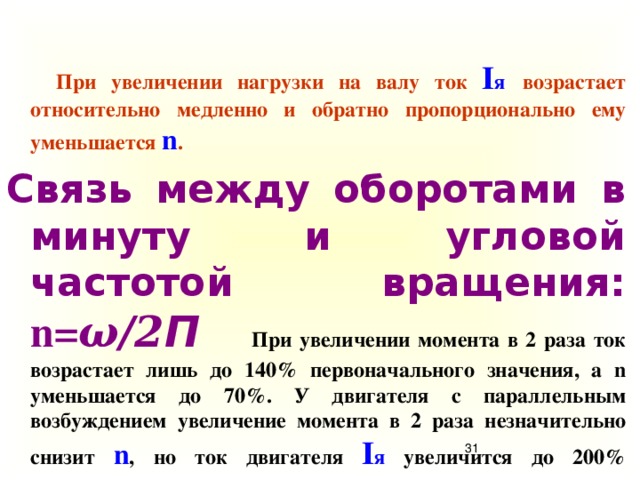
При увеличении нагрузки на валу ток I я возрастает относительно медленно и обратно пропорционально ему уменьшается n .
Связь между оборотами в минуту и угловой частотой вращения: n= ω/2 П При увеличении момента в 2 раза ток возрастает лишь до 140% первоначального значения, а n уменьшается до 70%. У двигателя с параллельным возбуждением увеличение момента в 2 раза незначительно снизит n , но ток двигателя I я увеличится до 200% начального.
30
Двигатель последовательного возбуждения может выдерживать значительные перегрузки томозным моментом при умеренном возрастании тока якоря.
Способы регулирования частоты вращения ДПТ ПВ:
- реостатное – включения добавочных реостатов последовательно в якорную цепь R ря
- полюсное – осуществляется шунтирование сериесной обмотки возбуждения ОВ реостатом R ш ;
- Безреостатное (якорное) – изменением напряжения на якоре (источник с регулируемым напряжением на выходе) что позволяет регулировать обороты двигателя n вниз от номинальных с сохранением высокого КПД двигателя
30
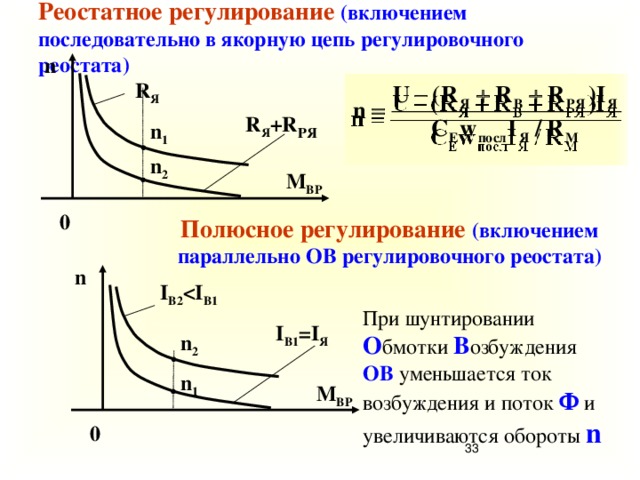
Реостатное регулирование (включением последовательно в якорную цепь регулировочного реостата)
n
R Я
R Я +R РЯ
n 1
n 2
M ВР
0
Полюсное регулирование (включением параллельно ОВ регулировочного реостата)
n
I B2 B1
При шунтировании О бмотки В озбуждения ОВ уменьшается ток возбуждения и поток Ф и увеличиваются обороты n
I B1 =I Я
n 2
n 1
M ВР
0
30
Якорное регулирование
Особенности данного способа:
а) регулирование только вверх
б) характеристики мягче, чем при регулировании сопротивлении якорной цепи
в) экономическое регулирование за счет малых потерь
г). Регулирование напряжением на зажимах ДПТ.
Якорное регулирование –способ регулирования частоты вращения якоря машины постоянного тока. Он предполагает наличие DC-инвертера (мощного регулируемого источника постоянного напряжения) – от которого питается цепь якоря машины. П рименяется в тяговых двигателях на электротранспорте, в подъемных устройствах. Якорное регулирование - изменением напряжения, подводимого к якорной обмотке требует введения отдельного источника питания для этой обмотки, так как ток возбуждения I В , а следовательно, и напряжение, подаваемое на обмотку возбуждения, при этом способе регулирования меняться не должны.
Частота вращения двигателя при неизменности магнитного потока Ф, т.е. тока возбуждения I В, прямо пропорциональна напряжению, подаваемому на обмотку якоря.
В лабораторных условиях можно реализовать якорное регулирование путем изменения общего напряжения питания, подаваемого на двигатель. При этом постоянство значения тока возбуждения I В поддерживается изменением сопротивления цепи возбуждения с помощью регулировочного реостата РР
n
U ном
n 1
U 1 ном
n 2
M ВР
0
33
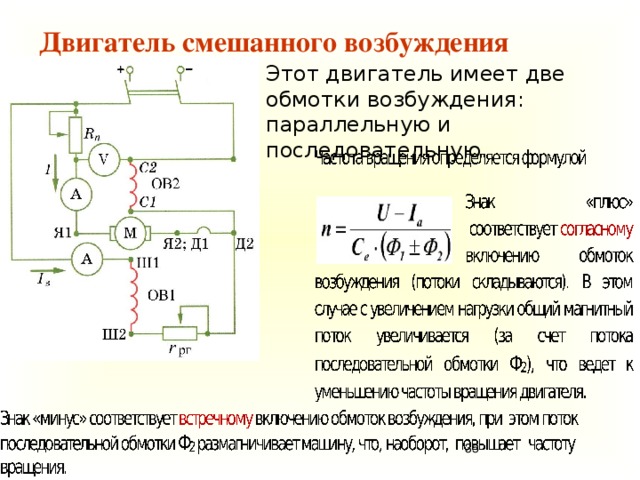
Двигатель смешанного возбуждения
Этот двигатель имеет две обмотки возбуждения: параллельную и последовательную.
34
Работа ДПТ смешанного возбуждения
- при этом становится неустойчивой, так как с увеличением нагрузки частота вращения неограниченно растет. Однако при небольшом числе витков последовательной обмотки с увеличением нагрузки частота вращения не возрастает и во всем диапазоне нагрузок остается практически неизменной.
- Характеристики ДПТ смешанного возбуждения при согласном включении обмоток.
- Скоростная и механическая характеристики этого двигателя более жесткие , чем у двигателя последовательного возбуждения, но менее жесткие, чем у двигателя параллельного возбуждения.
- Эти двигатели могут работать в режиме ХХ, ( в отличие от сериесных) так как поток параллельной обмотки Ф 1 ограничивает частоту вращения n и устраняет опасность «разноса».
- Регулировать частоту вращения можно реостатом r рг в цепи параллельной обмотки возбуждения. Однако наличие двух обмоток возбуждения удорожает и усложняет машину.
34
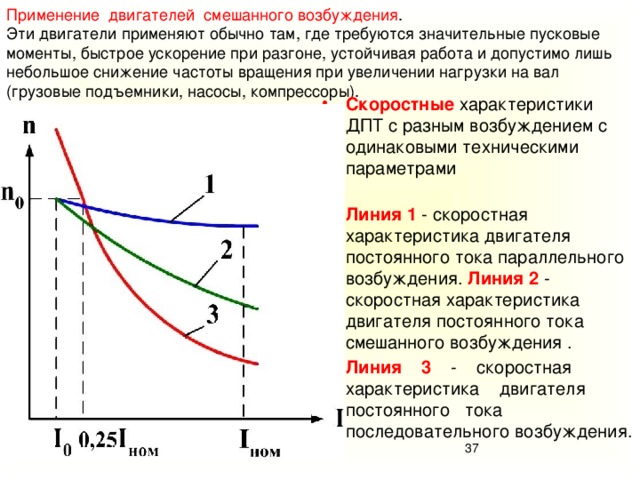
Применение двигателей смешанного возбуждения . Эти двигатели применяют обычно там, где требуются значительные пусковые моменты, быстрое ускорение при разгоне, устойчивая работа и допустимо лишь небольшое снижение частоты вращения при увеличении нагрузки на вал (грузовые подъемники, насосы, компрессоры).
- Скоростные характеристики ДПТ с разным возбуждением с одинаковыми техническими параметрами
- Линия 1 - скоростная характеристика двигателя постоянного тока параллельного возбуждения. Линия 2 - скоростная характеристика двигателя постоянного тока смешанного возбуждения .
- Линия 3 - скоростная характеристика двигателя постоянного тока последовательного возбуждения.
34
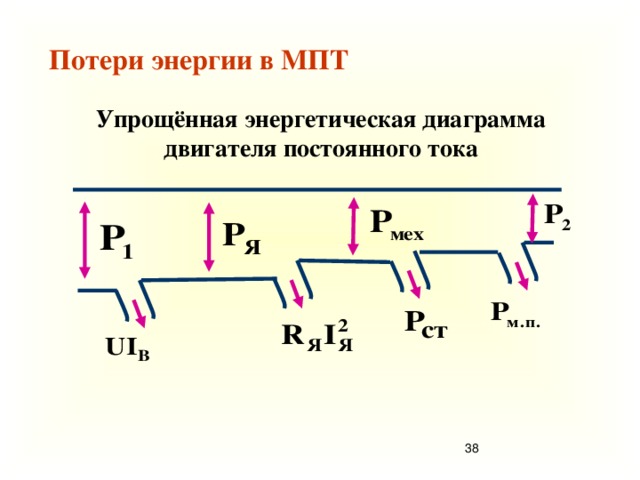
Потери энергии в МПТ
Упрощённая энергетическая диаграмма двигателя постоянного тока
34
Потери мощности и коэффициент полезного действия (КПД) коллекторной машины постоянного тока
- В машинах постоянного тока, как и в других электрических машинах, имеют место основные и добавочные потери мощности.
- Основные потери : Магнитные потери Р м
- Происходят только в сердечнике якоря, так как только этот элемент магнитной цепи машины подвергается перемагничиванию (так как якорь вращается в магнитном поле).
- Величина магнитных потерь, состоящих из потерь на гистерезис (на перемагничивание) и потерь от вихревых токов зависит от: частоты перемагничивания сердечника якоря ;
- значения магнитной индукции в зубцах якоря;
- толщины листов электротехнической стали, её магнитных свойств и качества изоляции этих листов в сердечнике якоря.
- Механические потери Р мех
- Складываются из потерь на трение щеток о коллектор, трения в подшипниках и трения крыльчатки вентилятора о воздух. Механические и магнитные потери при постоянной частоте вращения неизменны. Сумма этих потерь составляют потери холостого хода. Р 0 =Р м +Р мех
34
Электрические потери
- Они обусловлены нагревом обмоток и щеточного контакта. Потери в обмотке якоря: Р э.а =I 2 *R a Потери в цепи возбуждения определяются потерями в обмотке возбуждения и в реостате, включенном в цепь возбуждения: Р э.в =U в ·I в .
- Электрические потери в щеточном контакте : Р э.щ =ΔU щ ·I а
- Электрические потери зависят от нагрузки машины, поэтому эти потери называют переменными. б) Добавочные потери Р д :
- Потери в уравнительных соединениях секций обмоток;
- Потери в стали якоря из-за неравномерного распределения индукции при нагрузке;
- Потери в полюсных наконечниках из-за пульсации основного потока вследствие зубчатости якоря.
- Добавочные потери не поддаются точному определению и их принимают равными: для машин без компенсационной обмотки -1% от полезной мощности для генераторов или 1% от потребляемой мощности для двигателей; для машин с компенсационной обмоткой значение добавочных потерь принимают равными соответственно 0,5%.
34
Мощность на входе машины (потребляемая мощность), вт:
для генератора (механическая мощность) Р 1 =М 1 ·ω ( n=ω/2 П ) Р 1 =М 1 · n · 2 П
для двигателя (электрическая мощность) Р 1 =U·I .
Мощность на выходе машины (полезная мощность), Вт:
для генератора (электрическая мощность) Р 2 =U·I
для двигателя (механическая мощность) Р 2 =М 2 · n · 2 П
Здесь М 1 и М 2 – моменты на валу машины, Н·м; n - обороты вращения якоря, об/мин.
Коэффициент полезного действия η=Р 2 /Р 1
КПД это отношение полезной мощности Р 2 к потребляемой Р 1: Суммарная мощность потерь ΣP=Р м +Р мех +Р э.а +Р э.в +Р э.щ +Р д, тогда формулы определения КПД:
для генератора η г =Р 2 /Р 1 =Р 2 /(Р 2 + ΣP)= U·I/(U·I+ΣP
для двигателя η д = Р 2 /Р 1 =(Р 1 - ΣP)/Р 1 = (U·I+ΣP)/(U·I).
КПД машин постоянного тока мощностью от 1 до 100 кВт составляет 0,75-0,90, а для машин мощностью свыше 100 кВт 0,90-0,97.
КПД электрической машины можно определять:
а) методом непосредственной нагрузки по результатам измерений потребляемой мощности Р 1 и полезной мощности Р 2, но он применим только для машин малой мощности;
б) косвенным методом по результатам измерений потерь.
34







 Электрические машины: двигатели постоянного тока (1.37 MB)
Электрические машины: двигатели постоянного тока (1.37 MB)
 0
0 4244
4244 144
144 Нравится
0
Нравится
0


