 Получите свидетельство
Получите свидетельство Вход
Вход

Ранее говорилось о том, что механическое состояние тела или системы тел определяется его положением относительно других тел и его скоростью. Если изменяется хотя бы одна из этих величин, то говорят, что изменяется механическое состояние тела.
В курсе физики 7 класса говорилось, что количественно механическое состояние системы и его изменение характеризуется механической энергией.
Механическая энергия — это физическая скалярная величина, являющаяся функцией состояния системы и характеризующая способность системы совершать работу. Изменение механической энергии равно работе приложенных к системе внешних сил.

Вспомним,
как энергия тела зависит от его скорости. Пусть на тело массой m
действует
постоянная сила F, направленная вдоль
перемещения, и скорость тела изменяется от  до
до
 .
.

Работа этой силы будет определяться произведением силы на модуль вектора перемещения.

По второму закону Ньютона сила есть произведение массы тела на его ускорение.

Известно, что при равноускоренном движении ускорение можно определить по формуле

Если теперь, все собрать в одну формулу и произвести небольшие математические преобразования, получим:

Физическая величина, равная половине произведения массы тела на квадрат его скорости называется кинетической энергией.

Кинетическая энергия — это энергия, которой обладает тело вследствие своего движения.
Обозначается кинетическая энергия буквой Еk и измеряется в Джоулях.

Кинетической энергией обладают все движущиеся тела. Будь-то идущий человек или движущийся автомобиль, летящий самолет или наша планета, которая движется вокруг Солнца.

Тогда формулу для работы можно переписать в виде

Эта формула является математической записью теоремы об изменении кинетической энергии: изменение кинетической энергии равно работе равнодействующей всех сил действующей на тело.
Эта теорема справедлива независимо от того, какие силы действуют на тело: сила трения, сила тяжести или сила упругости.

А если тела не движутся? Обладают ли они какой-либо энергией?
Энергия системы, определяемая взаимным расположением тел или частей тела друг относительно друга и характером сил взаимодействия между ними, называется потенциальной энергией.
Рассмотрим некоторое тело, находящееся в гравитационном поле Земли.

При перемещении тела с высоты h1, относительно нулевого уровня, на высоту h2 сила тяжести совершает работу


Величину, равную произведению массы тела на высоту и на коэффициент пропорциональности g назвали потенциальной энергией.

Т.е. потенциальная энергия тела в поле тяготения — это энергия, обусловленная взаимодействием тела с Землей; она зависит от их взаимного положения и равна работе, которую совершает сила тяжести при перемещении тела из данного положения на нулевой уровень.
Обозначают её буквой Еp и единицей измерения, как и в случае кинетической энергии, является Джоуль.

Тогда, выражение для работы запишется как:

Т.е. изменение потенциальной энергии тела, которое находится в гравитационном поле Земли, взятое с обратным знаком, равно работе силы тяжести.
Знак «минус» перед величиной изменения потенциальной энергии означает, что при положительной работе силы тяжести эта энергия уменьшается. И, наоборот, при отрицательной работе силы тяжести (например, тело брошено вертикально вверх) потенциальная энергия тела увеличивается.
В отличие от кинетической энергии, которая зависит от скорости движения тела, потенциальная энергия от скорости не зависит, так что ею может обладать и покоящееся тело. Потенциальная энергия зависит от положения тела относительно нулевого уровня, т. е. от координат тела, ведь высота — как раз и есть координата тела.
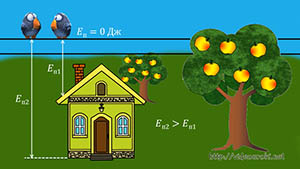
Нулевойуровеньдляпотенциальнойэнергииможновыбиратьсовершеннопроизвольно.
Например, птицы, сидящие на проводах, относительно проводов будут обладать нулевой потенциальной энергией, а относительно земли или крыши дома, энергия будет отлична от нуля. Причем относительно земли эта энергия будет больше, чем относительно крыши дома.

Рассмотрим, как будет изменяться потенциальная энергия упруго деформированного тела.
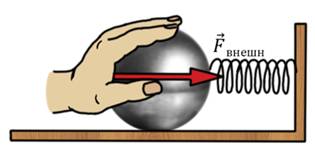
Рассмотрим взаимодействие сжатой пружины с шаром, находящимся нагладкой горизонтальной поверхности. Пружина действует на шар с силой упругости и, под действием этой силы, шар будет совершать колебательное движение.

Для определения работы, выполненной пружиной по перемещению тела, необходимо учитывать, что сила упругости меняется, т.к. ее величина зависит от удлинения пружины. Используя график зависимости силы упругости от удлинения пружины, определим работу силы как площадь фигуры под графиком силы (площадь трапеции), которая равна произведению полу суммы ее оснований на высоту.

 ,
,

Из формулы видно, что работа силы упругости пружины зависит только от координат тела в начальный и конечный момент времени и не зависит от траектории движения тела.
Эту формулу можно переписать в виде

В правой части стоит изменение какой-то величины со знаком минус. Как и в случае с работой силы тяжести, эта величина представляет собой потенциальную энергию упругодеформированного тела.
Т.е.

Тогда формула для работы упруго деформированного тела примет такой же вид, как и в случае с потенциальной энергией тела в гравитационном поле Земли.

Потенциальная энергия упругодеформированного тела — это энергия, обусловленная взаимодействием частей тела между собой. Она равна работе, которую совершают внешние силы, чтобы недеформированную пружину сжать или растянуть на некоторую величину.
Работа силы упругости зависит от жесткости пружины и ее деформации. Поэтому потенциальная энергия упругодеформированного тела тоже зависит от жесткости пружины и ее деформации.
Основные выводы:
– Механическая энергия — это физическая скалярная величина, являющаяся функцией состояния системы и характеризующая способность системы совершать работу.
– В свою очередь, механическая энергия делится на два вида — кинетическую и потенциальную.
– Кинетическая энергия — это энергия, которой обладает тело вследствие своего движения. А ее изменение равно работе равнодействующей всех сил действующей на тело.
– Потенциальная энергия — это энергия, определяемая взаимным расположением тел или частей тела друг относительно друга и характером сил взаимодействия между ними.
– Потенциальная энергия тела бывает двух видов: потенциальная энергия тела в поле тяготения — это энергия, обусловленная взаимодействием тела с Землей; и потенциальная энергия упругодеформированного тела — это энергия, обусловленная взаимодействием частей тела между собой.
 0
0 14130
14130

