Муниципальное бюджетное общеобразовательное учреждение
«Средняя общеобразовательная школа №1»
|
| | «Рассмотрено» Руководитель ШМО Ефименко М.В./___________/ Протокол № __________ от «____» августа 2014г. | «Согласовано» Заместитель директора по УВР МБОУ «СОШ №1» Пронина И.Д./_____________/ от «____» августа 2014 г. | «Утверждаю» Директор МБОУ «СОШ №1» Лавринеко Н.Г./___________ Приказ № __________ от «____» августа 2014 г. |
|
|
Рабочая программа
кружка информатики и конструирования
«Мой первый робот»
составлена учителем информатики Левшенковой Е.В.
1 час в неделю (35 часов)
г. Биробиджан 2014
Пояснительная записка
За последние годы успехи в робототехнике и автоматизированных системах изменили личную и деловую сферы нашей жизни. Роботы широко используются в транспорте, в исследованиях Земли и космоса, в хирургии, в военной промышленности, при проведении лабораторных исследований, в сфере безопасности, в массовом производстве промышленных товаров и товаров народного потребления. Многие устройства, принимающие решения на основе полученных от сенсоров данных, тоже можно считать роботами — таковы, например, лифты, без которых уже немыслима наша жизнь.
В настоящий момент для дальнейшего развития научной и промышленной робототехники необходима высокая обеспеченность инженерными кадрами. Введение кружка робототехники для детей 6-7 класса позволяет не только занять детей интересной и познавательной деятельностью во внеурочное время, но и способствует популяризации профессии инженера. Интенсивное использование роботов в быту, на производстве и поле боя требует, чтобы пользователи обладали современными знаниями в области управления роботами, что позволит развивать новые, умные, безопасные и более продвинутые автоматизированные системы. Необходимо прививать интерес учащихся к области робототехники и автоматизированных систем.
Конструктор LEGO MINDSTORMS EDUCATION EV3 и программное обеспечение к нему предоставляет прекрасную возможность учиться ребенку на собственном опыте. Такие знания вызывают у детей желание двигаться по пути открытий и исследований, а любой признанный и оцененный успех добавляет уверенности в себе. Обучение происходит особенно успешно, когда ребенок вовлечен в процесс создания значимого и осмысленного продукта, который представляет для него интерес. Важно, что при этом ребенок сам строит свои знания, а учитель лишь консультирует его.
Программное обеспечение отличается дружественным интерфейсом, позволяющим ребенку постепенно превращаться из новичка в опытного пользователя. Каждый урок - новая тема или новый проект. Модели собираются либо по технологическим картам, либо в силу фантазии детей. По мере освоения проектов проводятся соревнования роботов, созданных группами.
В конце года в творческой лаборатории группы демонстрируют возможности своих роботов.
Данный курс разработан для детей, ранее не занимающихся робототехникой. Основная форма работы – практические занятия, сочетающие в себе как освоение сформулированных в электронной среде знаний, так и элементы творческой исследовательской работы, направленной на преодоление возникших в ходе работы проблемных ситуаций.
Цель – обучение основам робототехники.
Задачи:
1. Стимулировать мотивацию учащихся к получению знаний, помогать формировать творческую личность ребенка.
2. Способствовать развитию интереса к технике, конструированию, программированию, высоким технологиям, формировать навыки коллективного труда.
3. Прививать навыки программирования через разработку программ в визуальной среде программирования, развивать алгоритмическое мышление.
Курс основан на использовании комплектов Lego Mindstorms EV3 и визуальной среды программирования для обучения робототехнике LEGO MINDSTORMS Education EV3.
Тематическое планирование
| № занятия | Тема занятия | Теоретическая часть | Практическая часть | Дата |
-
| Вводное занятие. ТБ. | Понятие «робот», «робототехника». Применение роботов в различных сферах жизни человека, значение робототехники. Просмотр видеофильма о роботизированных системах вооружения стран НАТО.
Показ действующей модели робота и его программ: на основе датчика освещения, ультразвукового датчика, датчика касания | Ознакомление с комплектом деталей для изучения робототехники: контроллер, сервоприводы, соединительные кабели, датчики-касания, ультразвуковой, освещения и цвета. Порты подключения. Создание приводной платформы. | |
-
| Ознакомление с визуальной средой программирования. | Понятие «среда программирования», «логические блоки». Показ написания простейшей программы для робота Понятие «программа», «алгоритм». Алгоритм движения робота по прямой. 
| Интерфейс программы LEGO MINDSTORMS Education EV3 и работа с ним. Написание программы для перемещения по прямой по образцу, настройка конфигурации режимов программируемых блоков, параметров и значений. |
|
-
| Движение по кривой. | Написание линейной программы. Понятия «Рулевое управление», «мощность», 
| Использование блока «Рулевое управление» для управления приводной платформой. Загрузка программы в модуль EV3 и ее тестирование. Самостоятельное программирование возвращения приводной платформы в начальное положение. |
|
-
| Независимое управление моторами. | Понятие «Независимое управление моторами», принципы его использования 
| Использование блока «Независимое управление моторами» для управления приводной платформой. | |
-
| Освобождение кубоида. | Блоки управления средними моторами. 
| Внесение изменений в конструкцию приводной платформы. Программирование приводной базы таким образом, чтобы переместить и освободить кубоид |
|
-
| Стоп-линия для робота. | Понятие яркости отраженного света. Знакомство с датчиком цвета. 
| Внесение изменений в конструкцию приводной платформы. Использование датчика цвета для остановки приводной платформы при обнаружении линии. |
|
-
| Ориентация в пространстве. | Знакомство с гироскопическим датчиком, правила работы с ним. Принципы его управления. 
| Использование гироскопического датчика для поворота на 45 градусов. Самостоятельное программирование поворота на заданное количество градусов. Внесение изменений в конструкцию приводной платформы. |
|
-
| «Глаз» летучей мыши. | Знакомство с ультразвуковым датчиком и режимом «Ожидание изменения». Принципы его управления. Измерение расстояния до препятствия. 
| Использование режима ультразвукового датчика «Ожидание изменения» для определения приближения к объекту. Внесение изменений в конструкцию приводной платформы. |
|
-
| Программирование на модуле EV3 | Интерфейс приложения для программирования на EV3. 
| Знакомство с приложением для программирования на модуле EV3. Создайте программу для приводной платформы. | |
-
| И танцую и пою. | Понятие параллельного программирования. Выбор и подключение звукового файла для воспроизведения. 
| Использование многозадачности для перемещения приводной платформы и воспроизведения звука одновременно. |
|
5 | Первая программа с циклом | Написание программы с циклом. Понятие «цикл». Использование блока «цикл» в программе. Знакомство с датчиком касания 
| Создание и отладка программы с использованием блока цикла для повторения серии действий. Эксперимент с циклом в режиме «Цикл неограничен» | |
-
| Движение вдоль линии | Знакомство с ветвящимися алгоритмическими структурами. Настройка датчика цвета. 
| Использование блока переключения для принятия решений в динамическом процессе на основании информации датчика |
|
-
| Соревнования роботов | Робототехнические соревнования
| Соревнования роботов на тестовом поле № 8547. Зачет времени и количества ошибок | |
-
| Управление цветом | Использование датчика цвета в режиме «Определить цвет» | Программирование приводной базы таким образом, чтобы она двигалась и поворачивала при обнаружении различных цветов. Самостоятельное изменение программы, чтобы робот по красному сигналу останавливался. |
|
-
| Шины данных | Понятие шины данных, ее назначение. | Самостоятельный эксперимент с тремя типами шин данных |
|
-
| Робот-танцор | Понятие «генератор случайных чисел». Использование блока «случайное число» для управления движением робота 
| Использование блока случайной величины для перемещения приводной платформы со случайно выбранной скоростью и в случайно выбранном направлении |
|
-
| Робот «просыпается» | Освещенность, использование числового ввода параметров блока движения, измеренных с помощью датчиков. 
| Использование блоков датчика для управления мощностью моторов приводной платформы в динамическом режиме. |
|
-
| Измерительный прибор. | 
| Отображение показаний ультразвукового датчика в режиме реального времени и их объединение с текстом. Самостоятельный эксперимент с измерением угла наклона гироскопа. |
|
-
| Робот-преследователь | 
| Использование ультразвукового датчика для перемещения приводной платформы вперед при нахождении кубоида в указанном диапазоне. Эксперимент с установкой блока диапазона в режим «Вне пределов» |
|
-
| Измеряем скорость | Конструирование формулы и расчет по произведенным измерениям. 
| Использование математического блока для расчета скорости приводной платформы. |
|
-
| Эксперимент с вращением | 
| Эксперимент со скоростью поворота, используя гироскопический датчик. Можно ли поворачивать модуль EV3 таким образом, чтобы значение оставалось постоянным и составляло 90 град/с? |
|
-
| Сравнение | Отношения «больше», «меньше» и «равно» 
| Использование датчик цвета для включения моторов приводной платформы при обнаружении определенных цветов. Эксперимент с изменением режима блока «Сравнение» на «Больше чем». |
|
-
| Управление касанием. | Понятие переменной. Ввод значения переменной. 
| Использование переменной для хранения числа оборотов, которое совершат моторы приводной платформы. |
|
-
| Калибровка датчика цвета. | 
| Выполнение калибровки датчика цвета в режиме «Освещение», чтобы увеличить чувствительность. |
|
-
| «Поговорим?» | Переименование модуля EV3. Блок «Обмен сообщениями». 
| Установление соединения посредством Bluetooth между двумя модулями. Отправляйте сообщения от одного модуля EV3 другому |
|
-
| Основы логики | Логическое И/ИЛИ. Таблицы истинности. 
| Эксперимент с логическими И/ИЛИ в условии. |
|
-
| Математика – дополнительные возможности. | Соотношение углов и сторон прямоугольно треугольника. 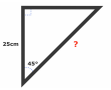
| Использование принципов тригонометрии для управления движением приводной платформы. |
|
-
| Массивы. | Понятие массива. Организация массива в EV3. Считывание массива при помощи сочетания датчиков цвета и касания. (цвет – индекс элемента массива, количество касаний – значение элемента массива). | Использование нескольких значений, сохраненных в памяти модуля EV3, для управления движением приводной платформы. |
|
-
| Гиробой - конструируем | Функциональные особенности робота «Гиробой» | Конструирование самобалансирующегося робота с использованием всех моторов и датчиков EV3 |
|
-
| Гиробой - программируем | Разбор структуры готовой программы для Гиробоя | Программирование самобалансирующегося робота с использованием всех моторов и датчиков EV3, а также дополнительными средствами программирования для управления его действиями. |
|
-
| Сортировщик цветов - конструируем | Функциональные особенности робота «Сортировщик цветов» | Конструирование сортировщика цветных элементов с использованием датчика цвета, датчика касания и моторов для управления | |
-
| Сортировщик цветов - программируем | Разбор структуры готовой программы для «Сортировщика цветов»
| Программирование сортировщика цветных элементов с использованием датчика цвета, датчика касания и моторов для управления |
|
-
| Щенок - конструируем | Функциональные особенности робота «Щенок» | Конструирование робота «Щенка» с использованием датчика цвета и касания |
|
-
| Щенок - программируем | Разбор структуры готовой программы для «Щенка»
| Программирование щенка с использованием датчика цвета, датчика касания, а также дополнительными средствами программирования для управления его действиями. |
|
-
| Защита проекта «Мой собственный уникальный робот» | | Создание собственных роботов учащимися и их презентация |
|
Список литературы
1. Правила Международных состязаний роботов
2. "Машины, механизмы и конструкции с электроприводом" книга для учителя. Научные редакторы С. Трактуева, П Якушкин.
3.«Инженерная механика» указание для учителя. Перевод М. Шапиро, С. Трактуева, В. Кузнецов.
4. Радость познания, том 4 «Человек и машины». М. Мир 1986г.
5. Базовый набор ПЕРВОРОБОТ. Книга для учителя. Перевод на русский язык. Институт новых технологий образования.
6. Конструкторы Лего Дакта в курсе информационных технологий. Введение в робототехнику. Чехлова А.В., Якушкин П.А. Москва, ИНТ 2001г.
7. ПЕРВОРОБОТ «Город и транспортные средства». Перевод на русский язык. Институт новых технологий образования.
8. «Политехнический словарь» гл. редактор И.И. Артоболевский. М.: «Советская энциклопедия» 1976г.
9. Технология и информатика: проекты и задания. ПервоРобот. Книга для учителя. - М.: ИНТ.-80с. Перевод на русский язык. Институт новых технологий.
МБОУ СОШ № 1
 Получите свидетельство
Получите свидетельство Вход
Вход









 Рабочая программа кружка по информатике и конструированию «Мой первый робот» (12.73 MB)
Рабочая программа кружка по информатике и конструированию «Мой первый робот» (12.73 MB)
 0
0 3406
3406 646
646 Нравится
0
Нравится
0


