Учитель: Тарасова Анна Ивановна
Предмет: Кружок по робототехнике
Класс: 5-6
Тема урока: Циклические алгоритмы в среде программирования mindstorms EV3
Задачи:
Образовательная:
Дать представление о применении циклических алгоритмов в среде программирования mindstorms EV3
Воспитательная:
Вовлечение в активную практическую деятельность
Развивающая:
Умение анализировать. обобщать и делать выводы, развитие коммуникативных навыков работы в группе.
Планируемые результаты:
Личностные:
Формирование целостного мировоззрения, соответствующего современному уровню развития науки и общественной практики.
Предметные:
Описание с использованием конструкции повторения
Умение создавать программы в среде программирования mindstorms EV3
Умение создавать и выполнять программы среде программирования mindstorms EV3
Метапредметные:
Умение устанавливать причинно-следственные связи
Умение строить логические рассуждения и умозаключения и делать выводы.
Межпредметные связи:
Формы деятельности: парная
Формы обучения: исследование, групповая и парная работа
Ресурсы: ПК учителя, ПК учащихся, интерактивная доска, среда программирования mindstorms EV3, медиапроектор, презентация по теме, лего - конструктор mindstorms EV3.
Тип урока: урок формирования первичных предметных навыков, овладения предметными умениями.
Цель: развитие алгоритмического мышления необходимого для профессиональной деятельности в современном обществе.
Ход урока
Организационный момент: Подготовка рабочего места и конструктора к работе.
Актуализация знаний:
Что означают данные пиктограммы?
1. 2.
2. 3.
3. 4.
4.
(На интерактивной доске нужно правильно соединить пиктограммы с их названием) (Слайд 2)
На прошлом уроке мы собрали с вами робота и изучили движение робота по траектории с одним датчиком. Какие алгоритмические структуры используются для построения данного алгоритма?
Выберите нужные пиктограммы и создайте программу движения робота по траектории с одним датчиком используя программу mindstorms EV3. (на интерактивной доске один из учащихся собирает схему, остальные проверяют правильность сборки)
Как вы думаете, как должна выглядеть программа, если у робота 2 датчика освещённости?
Первичное усвоение новых знаний:
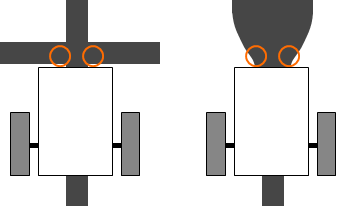
Нам необходимо определить. Как измениться программа. Рассмотрение следует начать с простейшего релейного регулятора и положения датчиков относительно линии.
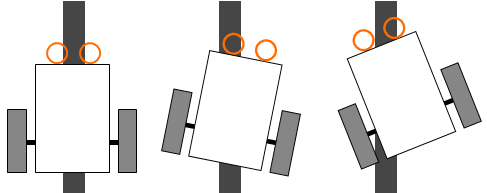 (Слайд 3)
(Слайд 3)
Также имеются положения для прохождения сложных трасс, где есть перекрёстки или утолщения.
 (Слайд 3)
(Слайд 3)
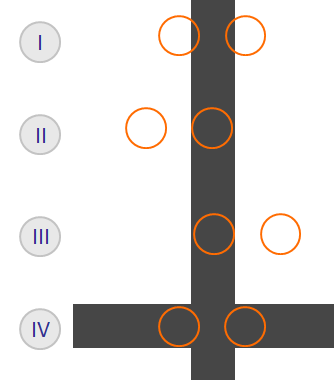
В итоге, все перечисленные положения можно свести к следующей классификации:
левый датчик, также как и правый - над светлой поверхностью
левый датчик над светлой поверхностью, правый датчик над темной
левый датчик над темной поверхностью, правый датчик над светлой
оба датчика находятся над темной поверхностью
 (Слайд 4)
(Слайд 4)
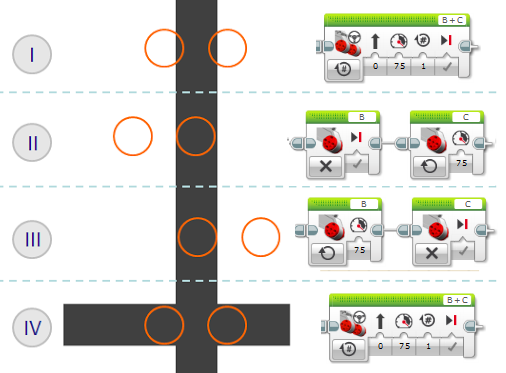
Если в определенный момент времени программа на роботе обнаруживает одно и из этих положений, она должна будет среагировать соответствующим образом:
Если оба датчика над белой поверхностью, то это нормальная ситуация, в которой линия находится между датчиками, поэтому робот должен ехать прямо.
Если левый датчик еще над светлой поверхностью, а правый датчик уже над темной, значит, робот заехал своей правой частью на линию, а значить ему нужно поворачивать направо, чтобы линия опять оказалась между датчиками.
Если левый датчик оказался над темной поверхностью, а правый еще над светлой, то для выравнивания роботу нужно поворачивать налево.
Если оба датчика над темной поверхностью, то в общем случае, робот опять продолжает двигаться прямо.
 (Слайд 5)
(Слайд 5)
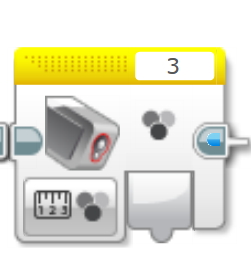
На схеме сразу же показано, как конкретно в программе должно меняться поведение моторов. Теперь, написание программы не должно составить большого труда. Начать стоит с того, чтобы выбрать какой датчик будет опрашиваться первым. Это не имеет большого значения, поэтому пусть будет левый. Необходимо определить, над светлой или над темной он поверхностью:
 (Слайд 6)
(Слайд 6)
Это действие еще не позволяет сказать в какую сторону роботу надо ехать. Но оно разделит состояния, перечисленные выше, на две группы: (I, II) для верхней ветви и (III, IV) для нижней. В каждой из групп теперь по два состояния, поэтому необходимо выбрать какое-то из них. Если внимательно посмотреть на первые два состояния I и II, то они отличаются положением правого датчика - в одном случае он над светлой поверхностью, в другом - над темной. Именно это и определит выбор, какое действие предпринять:
 (Слайд 7)
(Слайд 7)
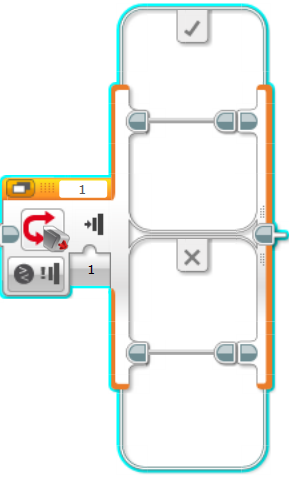
Теперь можно вставить блоки, определяющие поведение моторов согласно таблицам выше: верхняя ветвь вложенного условия определяет комбинацию "оба датчика на светлом", верхняя - "левый на светлом, правый на темном":
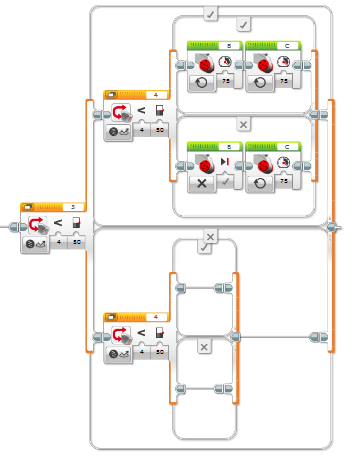 (Слайд 8)
(Слайд 8)
Получившиеся две ветви наполняются блоками движения. Верхняя ветвь отвечает за за состояние "левый на темном, правый на светлом", а нижняя - за "оба датчика на темном".
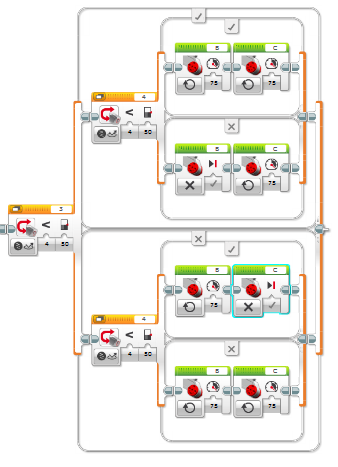 (Слайд 9)
(Слайд 9)
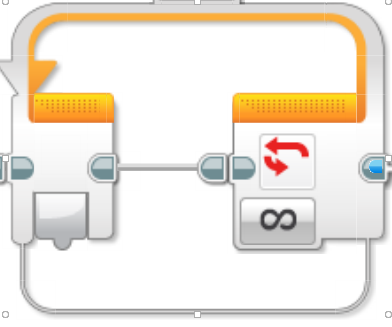
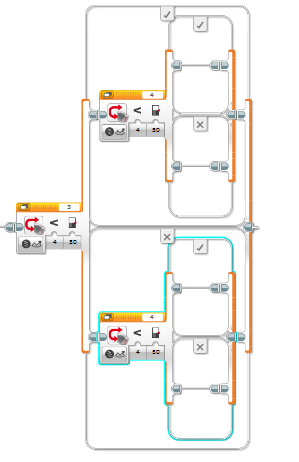
Следует отметить, что данная конструкция всего лишь определяет, как включить моторы в зависимости от показаний сенсоров в определенном месте поля, естественно через мгновение программа должна проверить не изменились ли показания, чтобы соответствующим образом подправить поведение моторов, а через мгновение еще раз, еще и т.д. Поэтому она должна быть помещена в цикл, который будет обеспечивать такую повторяющуюся проверку:
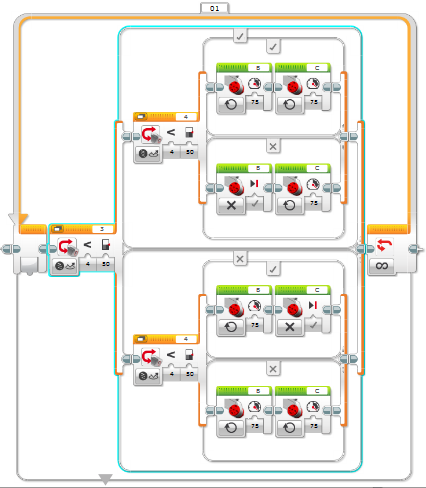 (Слайд 10)
(Слайд 10)
Такая довольно простая программа будет обеспечивать довольно высокую скорость передвижения робота вдоль линии без вылета за ее пределы, если правильным образом настроить максимальную скорость при движении в состояниях I и IV, а также задать оптимальный способ торможения в состояниях II и III - чем круче повороты на трассе, тем "жестче" должно быть торможение - скорость должна сбрасываться быстрее, и наоборот - при плавных поворотах вполне можно применять торможение через выключение энергии или даже вообще через незначительный сброс скорости.
Первичная проверка понимания
Предлагаю вам снабдить робота вторым датчиком света.
Датчики будут располагаться по разные стороны от линии и, соответственно, помогут роботу более оперативно реагировать на изменение направления движения.
Написать программу для робота, проверить работу робота на траектории и произвести отладку.
Найти оптимальную скорость для похождения траектории. (Слайд 11)
Итог урока:
1. Какие пиктограммы использовали при написании программы для двух датчиков?
2. Как вы думаете, робот с одним датчиком света более точно проходит траекторию, чем с двумя? (ответ обосновать)
3. Нужно ли проводить калибровку обоих датчиков освещённости, или хватит данных с одного датчика?
4. Что должен сделать робот, если правый датчик полностью на светлой части поля, а левый полностью на чёрном? (Слайд 12)
Урок подготовлен с использованием материала размещённым на сайте http://www.prorobot.ru/lego/line-following-2-sensors.php - Pro robot.ru
 Получите свидетельство
Получите свидетельство Вход
Вход










 Кружок по робототехнике на тему "Циклические алгоритмы в среде программирования mindstorms EV3" (5-6 класс) (5.8 MB)
Кружок по робототехнике на тему "Циклические алгоритмы в среде программирования mindstorms EV3" (5-6 класс) (5.8 MB)
 0
0 1650
1650 307
307 Нравится
0
Нравится
0


