 Получите свидетельство
Получите свидетельство Вход
Вход




Методическая разработка открытого занятия
«Шорт-Трек. Робот для Шорт-Трека»
Направление: «Современный урок и внеурочная деятельность»
Ковязин Владимир Анатольевич,
Педагог дополнительного образования
Муниципальное бюджетное образовательное учреждение дополнительного образования детей
Страна: Россия
629300 ЯНАО г. Новый Уренгой
ул. Молодежная, 17-А
E-mail: kovyazin.70@mail.ru
т: 89124307079
Цели:
проектирование и конструирование;
поиск альтернативных творческих решений;
развитие пространственных и математических представлений в процессе конструирования.
Задачи:
образовательная: формировать умения и навыки проектирования и конструирования;
развивающая: развивать конструкторские навыки, творческое воображение;
воспитательная: воспитывать трудолюбие и стремление добиваться выполнения поставленной задачи.
Оборудование: компьютер, конструктор Lego Mindstorms EV3, поле Шорт-Трек.
Ход занятия
Организационный момент.
Повторение.
Блиц опрос.
1) Какие виды моторов используются в конструкторе Lego Mindstorms EV3?
2) Какие виды механических передач вам известны?
3) Чем рама отличается от балки?
4) Какие виды крепежных деталей из конструктора Lego вы знаете?
5) Чем втулка отличается от штифта?
6) Какую деталь конструктора называют ступицей?
7) К каким портам модуля подключают датчики и моторы?
8) Как перезагрузить модуль EV3?
Изучение нового материала.
Назначение Шорт-трека.

Шорт-трек является логическим завершением движения роботов по черной линии. По своей сути он представляет собой гонку роботов. Робот должен двигаться по черной линии как можно точнее и быстрее.
- Условия состязания.
Цель робота – за минимальное время проехать по линии N полных кругов (количество кругов определяет главный судья соревнований в день соревнований). Движение осуществляется в направлении по часовой стрелке. Круг – полный проезд роботом трассы, с возвращением в место старта, пересекая при этом линию старта-финиша.
Правила проведения состязаний
Квалификационные заезды
1. Количество квалификационных заездов определяет главный судья в день соревнований.
2. В квалификационном заезде участвует 1 робот.
3. Робот устанавливается перед линией старта.
4. Заезд останавливается судьей, если робот не может продолжить движение в течении 30 секунд или время прохождения трассы превышает 60 секунд.
5. Заезд на квалификационном этапе состоит из одного полного круга.
6. Окончание заезда фиксируется судьей состязания.
7. Фиксируется время прохождения трассы.
8. Если робот сходит с дистанции (оказывается всеми колесами с одной стороны линии), то он снимается с заезда, при этом роботу записываются время, равное 60 секунд.
Финальные заезды
1. В финальных заездах участвуют одновременно два робота (пара) на поле.
2. Пары для заездов и дорожка каждого робота определяются с помощью жеребьевки.
3. Роботы устанавливаются у линий старта в одинаковом направлении.
4. В ситуации, когда робот догоняет соперника, заезд досрочно завершается, но при условии проезда не менее 5 секунд без столкновения. Победителем заезда объявляется робот, догнавший соперника.
Столкновение роботов
1. Входе заезда действует правило “перекресток проезжает первый”. Робот пришедший к перекрестку вторым обязан пропустить первого, в случае столкновения – дисквалификация участника, совершившего наезд на соперника.
2. В случае, когда невозможно определить виновника столкновения, судья обязан назначить переигровку, при этом роботы меняются дорожками.
Определение победителя
Соревнования проводятся в два этапа – квалификация и финальные заезды. Между квалификационными заездами будет предоставлено время на дополнительную отладку робота. Между квалификационными и финальными заездами роботы остаются в карантине, время на отладку не предоставляется.
1. По результатам квалификации на основании времени заездов составляется рейтинг роботов.
2. В финальные заезды проходят роботы, занявшие первые места в квалификации. Количество финалистов определяется главным судьей соревнований в день соревнований в зависимости от количества команд участников.
3. Финальные заезды проходят по олимпийской системе (игра на вылет). Судьи соревнований формируют турнирную сетку, в каждом круге из участников составляются пары в соответствии с рейтингом квалификационных заездов и жеребьевки.
4. Из каждой пары в следующий круг выходит победитель заезда.
5. Перед финальным кругом судьи соревнований проводят заезд за третье место.
6. Победителем соревнования становится робот, победивший в финальном круге. Второе место присуждается роботу, проигравшему в финальном круге.
Поле для Шорт-Трека
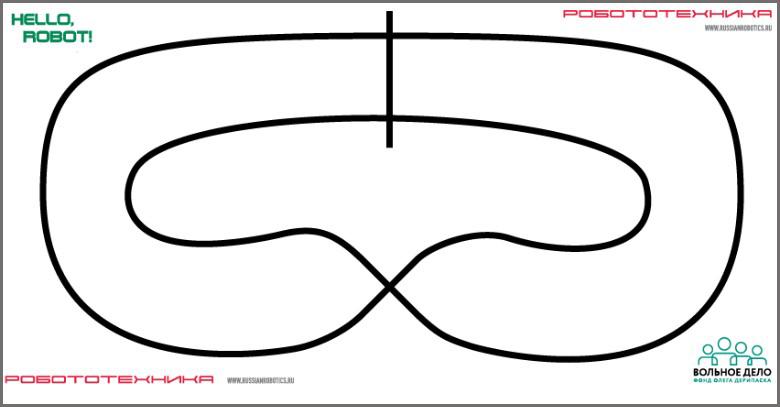
1. Размеры игрового поля 1200*2400 мм.
2. Поле представляет собой белое основание с черной линией траектории.
3. Линии на поле могут быть прямыми, дугообразными, пересекаться под прямым углом.
4. Толщина черной линии 18-25 мм.
5. На линии возможно размещение препятствий (только в одном месте большого и малого круга): горка (размер: 250 мм шириной, 250 мм длиной и 30-50 мм высотой; основной цвет поверхности белый), балка (высотой и шириной в один модуль; длиной не менее 250 мм; цвет белый). Препятствия жестко закреплены на поверхности поля, линия трассы на препятствиях не прерывается. Наличие и место расположения препятствий объявляется в день соревнований.
Требования к роботу для Шорт-Трека
1. Максимальные размеры робота 200*200*200 мм.
2. Во время заезда робот не может изменять свои размеры
3. Допускается использование только одного контроллера в конструкции робота.
4. Движение роботов начинается после команды судьи и нажатия оператором кнопки или с помощью датчика, при этом робот стоит на полигоне.
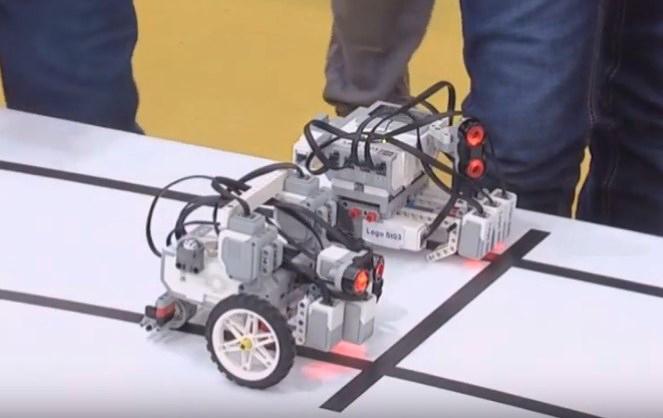
Сборка своего робота для Шорт-Трека
Выполняется самостоятельно на усмотрение обучающихся из конструктора Lego Mindstorms EV3.
Робот должен иметь ультразвуковой, или инфракрасный датчик для обнаружения соперника. А также 2, или 3 датчика цвета для движения по черной линии. Результат движения робота зависит от количества датчиков, их расположения, а также ходовой части робота (колес).
При этом важно обратить внимание на то, чтобы конструкция робота была компактной и прочной.
Пример программы для робота с 2 датчиками цвета
Программа представляет собой конструкцию цикл в цикле.
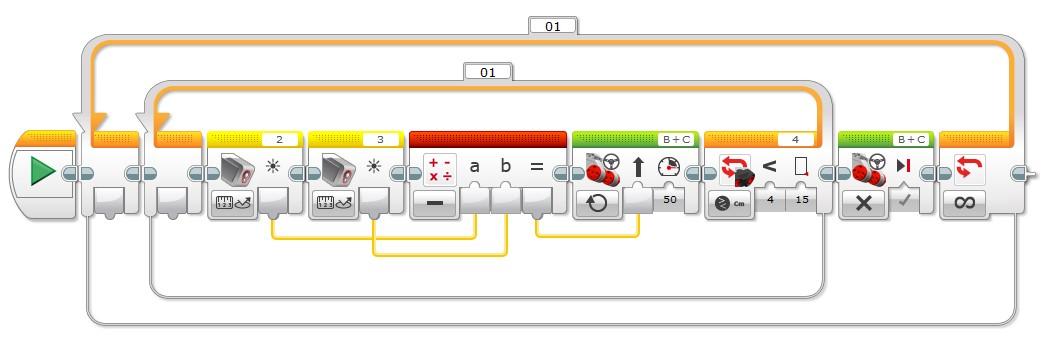
Внутренний цикл предназначен для движения робота по черной линии. Он прерывается, когда робот обнаруживает своего соперника на расстоянии 15 см и менее. Робот останавливается. После чего весь процесс движения вновь повторяется во внешнем цикле.
Программа для робота с 3 датчиками цвета будет иметь похожий вид.
Подведение итогов:
а) Просмотр и сравнение собранных конструкций;
б) Отладка роботов и проведение пробных заездов;
в) Проведение соревнований.









 Методическая разработка открытого занятия «Шорт-Трек. Робот для Шорт-Трека» (402.5 KB)
Методическая разработка открытого занятия «Шорт-Трек. Робот для Шорт-Трека» (402.5 KB)
 0
0 546
546 43
43 Нравится
0
Нравится
0


