 Получите свидетельство
Получите свидетельство Вход
Вход

Итак, мы уже с вами знаем, что любое состояние тела (или системы тел) характеризуется его координатами и скоростью. И если изменяется хотя бы одна из этих величин, то говорят, что изменилось механическое состояние тела. Количественно механическое состояние системы и её изменение характеризуется механической энергией. Напомним, что механическая энергия — это физическая величина, являющаяся функцией состояния системы и характеризующая её способность совершать работу.
Так же мы с вами говорили о том, что в механике принято выделять два вида механической энергии: кинетическую и потенциальную.
Кинетической энергией обладает любое движущееся тело. А её изменение равно работе равнодействующей всех сил, действующих на него. При этом не важно, какие силы действуют на тело: сила упругости, сила трения или сила тяжести. Теорема о кинетической энергии справедлива всегда.
Потенциальная энергия — это энергия, обусловленная взаимным расположением тел или частей тела друг относительно друга и характером сил взаимодействия между ними.
Её изменение тоже равно работе. Однако эта работа будет зависть от того, какие силы действуют на тело.
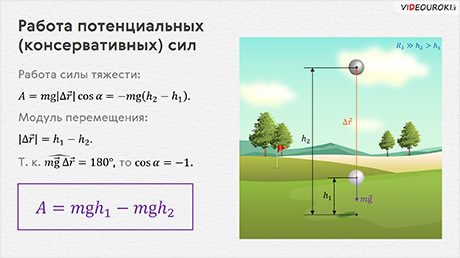
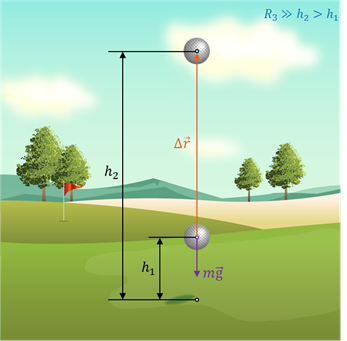
Итак, пусть у нас есть материальная точка массой т, которая под действием силы тяжести перемещается с высоты h1 до высоты h2. При этом будем считать, что данные высоты намного меньше радиуса Земли, чтобы действующая на материальную точку сила тяжести была постоянной.
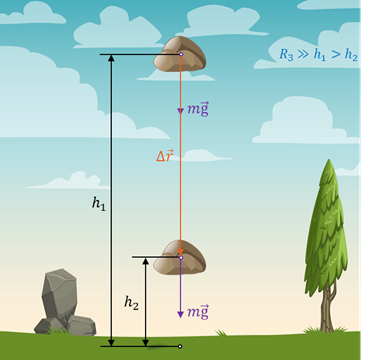
Тогда работа, совершаемая этой силой при перемещении тела с одного уровня на другой, будет равна произведению модуля вектора силы тяжести на модуль вектора перемещения точки и на косинус угла между этими двумя векторами.
A = mg|Δr|cosα.
В нашем примере направление вектора перемещения и вектора силы тяжести совпадают. Следовательно, угол между этими двумя ве́кторами равен нулю. А косинус нуля градусов — это единица. Что касается перемещения точки, то из рисунка видно, что его модуль равен разности высот «Аш один» и «Аш два» (h1 и h2). Значит, работа силы тяжести положительна и равна произведению модуля силы тяжести и разности высот:
A = mg(h1 – h2) = mgh1 – mgh2.
Теперь давайте с вами найдём работу силы тяжести при подъёме материальной точки с высоты h1 до высоты h2 над поверхностью Земли.
Запишем формулу для работы силы тяжести в общем виде:
A = mg|Δr|cosα.
Модуль перемещения, как и в предыдущем случае, равен разности в конечном и начальном положениях точки:
Δr = h2 – h1.
Но теперь векторы силы тяжести и перемещения направлены в противоположные стороны. Значит, угол между этими двумя векторами составляет 180о. А сos180o = –1. Перепишем формулу для работы с учётом наших рассуждений:
A = mgh1 – mgh2.
Как видим, мы с вами получили точно такое же выражение для работы силы тяжести, что и в предыдущем случае.
И давайте ещё раз определим работу силы тяжести, но для случая, когда тело переходит с одной высоты на другую не по вертикали.

Обозначив угол между направлением вектора силы и вектора перемещения через α, запишем формулу для работы силы тяжести в общем виде:
A = mg|Δr|cosα.
Для определения перемещения точки воспользуемся получившимся прямоугольником треугольником ΔMKN, в котором гипотенуза — это искомое перемещение, а один из острых углов — это наш угол между вектором силы и вектором перемещения. Тогда очевидно, что произведение модуля вектора перемещения на косинус угла альфа равно длине прилежащего к углу катета МК:
MK = |Δr|cosα.
С другой же стороны
MK = h1 –h2.
Тогда получается, что работа силы тяжести вновь определяется той же формулой, что и в предыдущих двух случаях:
A = mgh1 – mgh2.
Отсюда следует главный вывод о том, что работа силы тяжести не зависит от того, по какой траектории движется материальная точка и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях точки.
Тогда становится очевидным, что в случае движения точки по замкнутой траектории работа силы тяжести будет равна нулю, так как начальное и конечное положения точки совпадают.
Силы, работа которых не зависит от формы траектории точки приложения силы и которые на замкнутой траектории равны нулю, называются потенциальными или консервативными силами. Значит, сила тяжести — это консервативная сила.
Теперь давайте найдём формулу для работы, совершаемой силой упругости. Для этого рассмотрим механическую систему, состоящую из пружины и прикреплённого к ней шарика, через который проде́т тонкий металлический стержень, по которому шарик может свободно скользить практически без трения. Так как действующая на шар сила тяжести уравновешивается силой нормальной реакции стержня, то вся система находится в состоянии равновесия.
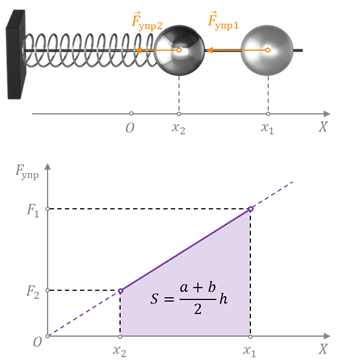
Направим координатную ось ОХ параллельно стержню, а за начало отсчёта примем центр тяжести шара в положении равновесия. Теперь отведём шар от положения равновесия на некоторое расстояние. Пружина при этом растянется и в ней возникнет сила упругости, модуль которой будет определяться на основании закона Гука:
F1 = kx1.
Если мы теперь отпустим шарик, то он за счёт совершения работы силой упругости придёт в движение. Предположим, что шар переместился так, что его координата стала равной x2, а модуль силы упругости — F2 = kx2. Тогда модуль перемещения шарика будет равен разности между его начальной и конечной координатой:
|Δr| = x1 – x2.
Так как сила упругости является переменной силой, то для нахождения совершённой ею работы воспользуемся графиком зависимости модуля силы упругости от координаты шара.
Как нам уже известно, работа силы численно равна площади под графиком силы. В нашем случае это площадь трапеции, основаниями которой являются силы упругости пружины в начальном и конечном состояниях, а высота — это перемещение тела:
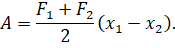
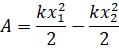
Из полученной нами формулы следует, что работа силы упругости пружины зависит только от координат её конца в начальном и конечном состояниях. То есть она не зависит от формы траектории. Тогда становится очевидным, что если начальное и конечное состояния пружины совпадают, то работа силы упругости будет равна нулю. Следовательно, сила упругости, как и сила тяжести, является потенциальной (или консервативной) силой.
На прошлом уроке мы с вами ввели понятие потенциальной энергии, которая определяется взаимным расположением тел или частей тела друг относительно друга.
Введя понятие потенциальной энергии, мы с вами получаем возможность выразить работу любых консервативных сил через изменение потенциальной энергии. Напомним, что под изменением величины понимают разность между её конечным и начальным значениями:
ΔЕп = Еп2 – Еп1.
Тогда для работы силы тяжести и силы упругости можно записать, что изменение потенциальной энергии материальной точки равно работе консервативной силы, взятой с обратным знаком:
А = Еп1 – Еп2 = –(Еп2 – Еп1) = – ΔЕп.
Таким образом, работа консервативных сил определяет не саму потенциальную энергию точки, а её изменение. И лишь это изменение в механике имеет физический смысл. Поэтому можно произвольно выбрать состояние системы, в котором её потенциальная энергия считается равной нулю. Этому состоянию соответствует нулевой уровень отсчёта потенциальной энергии. Его выбор диктуется условиями конкретной задачи.
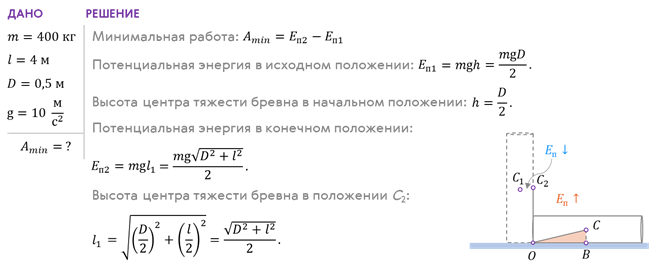
Для примера решим с вами такую задачу. Бревно цилиндрической формы массой 400 кг, длиной 4 м и диаметром основания 50 см лежит на земле. Какую минимальную работу необходимо совершить, чтобы это бревно поставить в вертикальное положение? Ускорение свободного падения примем равным 10 м/с2.


 9665
9665

