 Получите свидетельство
Получите свидетельство Вход
Вход



11

Муниципальное автономное общеобразовательное учреждение
«Гимназия № 31»
Тема:
«Основы образовательной робототехники на уроках физики»
Работу выполнила:
Милютина Юлия Викторовна
учитель физики высшей категории
МАОУ «Гимназия № 31» г. Перми
Конт. телефон: 89127885666
Электрон. почта: [email protected]
Пермь, 2017
Содержание
Введение. Актуальность использования робототехники в техническом образовании.
Встраивание элементов робототехники в современный урок.
Разработка практической работы по физике с элементами робототехники по теме «Измерение скорости».
Выводы.
Литература.
Введение. Актуальность использования робототехники в техническом образовании.
Сегодня в мире используются десятки миллионов роботов. Нет такой области человеческой деятельности, в которой человек не попытался создать себе автоматического помощника. Уже в ближайшем будущем развитие роботов значительно изменит образ жизни человека, требуя от человека нового уровня мышления, нового уровня проектирования и обслуживания современного оборудования. По мнению экспертов, в ближайшее время в робототехнике произойдут революционные изменения, и роботы станут такими же доступными, как сейчас компьютеры. Практически каждый из нас сегодня имеет дело с домашними роботами. Мы программируем бытовых роботов при выборе последовательности действий стиральной машины или задания записи телепередачи с телевизора. Каждый современный автомобиль включает в себя роботизированные системы. Мы можем встретить роботов на кухне, в медицинском кабинете, в поезде и магазине. Даже лифт является роботом, в программировании которого мы принимаем участие.
В настоящее время вопросам включения в образовательное пространство изучения основ робототехники во всем мире уделяется достаточно внимания. Основная задача при этом состоит в том, чтобы охватить как можно больше молодёжи с целью привлечения её к науке и инженерному делу.
Робототехника - прикладная наука, занимающаяся разработкой автоматизированных технических систем и являющаяся важнейшей технической основой роста производства.
Актуальность развития робототехники в сфере образования обусловлена необходимостью подготовки инженерно-технических кадров для промышленных отраслей. В связи с этим перед сферой образования встаёт задача включения робототехники в различные уровни учебного процесса.
Встраивание элементов робототехники в современный урок.
Изучение робототехники тесно связано с изучением в начальной школе математики, окружающего мира, в основной и старшей школе - физики, химии, геометрия, ОБЖ, информационных технологий. Конструкторы LEGO зарекомендовали себя как образовательные продукты во всем мире.
Успешному использованию Lego-конструкторов в образовательном процессе способствуют такие особенности как:
универсальность: возможность использования в начальном, основном общем и среднем (полном) общем образования;
метапредметность: использование на уроках и во внеурочной деятельности естественнонаучного и гуманитарного циклов;
нетрадиционность: конструкторы развивают творческие, исследовательские, нешаблонные способы деятельности.
В связи с внедрением Федеральных государственных образовательных стандартов (ФГОС) нового поколения одним из возможных вариантов изменения форм организации современного учебного процесса является встраивание робототехники в различные составляющие учебного процесса: подготовка и проведение демонстрационного эксперимента, создание экспериментальных установок для лабораторных и исследовательских работ, выполнение проектов по разным предметам учебного плана.
Анализ и обобщение имеющегося опыта работы позволил выделить следующие направления использования роботов в преподавании физики:
1. Робот как объект изучения. Изучение физических принципов работы датчиков, двигателей и других систем конструктора.
2. Робот как средство измерения в традиционном эксперименте. Датчики базового конструктора и дополнительные виды датчиков (Vernier, HiTechnic и др.) используются как измерительная система в физическом эксперименте с обработкой и фиксацией его результатов в различных видах.
3. Робот как средство постановки физического эксперимента (роботизированный эксперимент). Комплексное использование двигателей, систем оповещения, датчиков, робототехнического конструктора в демонстрационном и лабораторном эксперименте.
4. Робот как средство учебного моделирования и конструирования. Применение образовательной робототехники в проектно-исследовательской и конструкторской работе учащихся.
Разработка практической работы по физике с элементами робототехники по теме «Измерение скорости».
ЦЕЛЬ: овладеть практическими навыками измерения скорости тела по величине его перемещения и времени движения.
ЗАДАЧИ:
• Формирование новых понятий.
• Актуализация знаний.
• Применение новых знаний к решению практических задач.
• Развитие конструкторских и вычислительных навыков.
ФОРМИРУЕМЫЕ УУД:
• Личностные: принимать и сохранять учебную цель и задачу.
• Регулятивные: способность ставить новые учебные цели и задачи.
• Познавательные: формирование представлений о скорости и её измерении.
• Когнитивные: умение аргументировать свою точку зрения.
УЧЕБНИК: Перышкин А. В. «Физика 7 класс».
ОБОРУДОВАНИЕ: Компьютер (1 ПК на 2-х учащихся), свободный выход в Интернет; конструктор Lego Mindstorms 9797, рабочие бланки, инструкции по сборке; линейка (или рулетка); калькулятор.
Теоретическая часть
1. Равномерное прямолинейное движение.
Рассматривая движение каких-либо тел, мы всегда отмечаем: на самолете добраться до нужного места можно гораздо быстрее, чем на поезде; автомобиль движется быстрее велосипедиста и т.п.
Движение различных тел происходит с разной быстротой.
Для характеристики быстроты и направления движения тела служит векторная величина, называемая скоростью.
Обозначается скорость буквой V, а время движения буквой t. Таким образом, скорость тела при равномерном движении — это величина, равная отношению пути ко времени, за которое этот путь пройден.
В системе «СИ» за основную единицу скорости принят м/с (метр в секунду): [V]=[м/с]. Скорость равномерного движения, равная 1 м/с, показывает, что тело за 1 с проходит путь длиной в 1 м. [V]=[м/с] — это производная единица, её получают согласно формуле скорости, подставляя вместо физических величин, входящих в формулу, единицы их измерения.
Ход работы
1. Модель трех (или четырех) колесной тележки – робота.
Для этого можно использовать инструкцию по созданию робота-пятиминутки здесь: http://www.prorobot.ru/lego/robot_5minutka.php
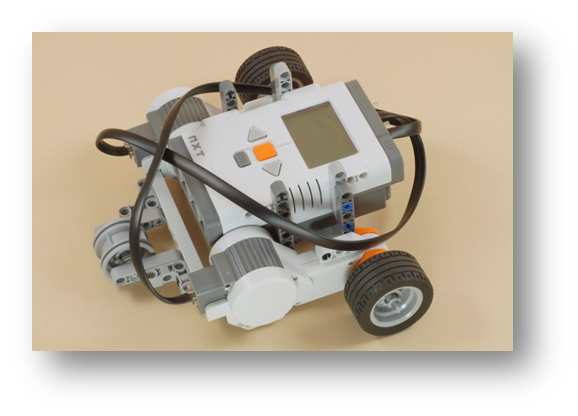
Либо вы можете придумать и собрать конструкцию собственного робота на колесах.
Задача: Открыть наборы Lego Mindstorms 9797 и создать модель робота.
2. Составление программы для измерения скорости движения.
Можно использовать следующую программу:

Задача:
- Открыть ноутбуки.
- Загрузить среду программирования Lego Mindstorms NXT 2.0
- Создать программу по образу на рисунке.
- Загрузить программу в блок NXT.
3. Проверка правильности выполнения программы.
Задача:
- Запустите выполнение программы в блоке NXT.
- Убедитесь, что робот едет по прямой траектории, не виляет.
- Проверьте, чтобы на экране показывается значение скорости робота.
Условия эксперимента:
1. Соберите трех (или четырех) колесную тележку. Обязательно с двумя моторами.
2. Используются моторы B и С.
3. Время движения робота: 5 секунд.
1 часть
4. Запустите робота. Каково значение скорости на экране робота ____см/с?
5. Возьмите рулетку (или линейку). И измерьте расстояние.
6. Каково расстояние, пройденное роботом за 5 секунд? ____см
7. Возьмите калькулятор и вычислите скорость робота. Все вычисления
запишите ниже.
8. Чему равна вычисленная вами скорость движения робота? __см/с.
9. Сравните эту скорость с тем, что вы видели на экране монитора блока NXT.
10. Запишите вашу гипотезу о причинах отличия результатов:
Чтобы избежать погрешности, выполните пункты 4-8 еще 2 раза и результаты запишите в таблицу.
| № опыта | Пройденное расстояние, (см) | Время движения, (с) | Скорость робота на экране блока NXT (см/с) | Вычисленная скорость (см/с) |
| 1 |
| 5 |
|
|
| 2 |
| 5 |
|
|
| 3 |
| 5 |
|
|
Вычислите среднее арифметическое значение скорости по формуле:
![]()
Где V1, V2, V3 – значения скорости в 4 и 5 столбцах таблицы.
Результат запишите ниже:
Выполните измерения скорости робота для четырех значений мощности мотора. Результаты запишите в таблицу.
| № опыта | Мощность мотора, % | Пройденное расстояние, (см) | Время движения, (с) | Скорость робота на экране блока NXT (см/с) | Вычисленная скорость (см/с) |
| 1 | 25 |
| 5 |
|
|
| 2 | 50 |
| 5 |
|
|
| 3 | 75 |
| 5 |
|
|
| 4 | 100 |
| 5 |
|
|
Сделайте вывод: как зависит скорость движения робота от мощности мотора?
Выводы.
Важнейшей отличительной особенностью стандартов нового поколения является их ориентация на результаты образования, причем они рассматриваются на основе системно-деятельностного подхода. Деятельность выступает как внешнее условие развития у ребенка познавательных процессов. Образовательная задача состоит в организации условий, провоцирующих детское действие. Такую стратегию обучения легко реализовать в образовательной среде LEGO, которая объединяет в себе специально скомпонованные для занятий в группе комплекты ЛЕГО, тщательно продуманную систему заданий для детей и четко сформулированную образовательную коцепцию.
Опыт показывает, что внедрение робототехники в образовательный процесс способствует развитию коммуникативных способностей учащихся, развивает навыки взаимодействия, самостоятельности при принятии решений, раскрывает творческий потенциал. Учащиеся лучше понимают принципы действия различных механизмов, когда они что-либо самостоятельно создают или изобретают.
Литература
Вахрушев Д.И. «Встраивание элементов робототехники в современный урок: проблемы и перспективы».
Глухов П.П. «Макетирование образования будущего на основе проектной деятельности». // Профессиональное самоопределение молодежи инновационного региона: проблемы и перспективы: сборник статей по материалам научно-практической конференции / под общей ред. Смоляниновой О.Г., член-корр. РАО, д.п.н., проф. – Красноярск, 2013.
Дмитриева О.А. «Анализ состояния и проблемы использования леготехнологий на уроках физики». Источник: http://www.prodlenka.org/
Ершов М.Г. «Возможности использования образовательной робототехники в преподавании физики». XXI век — время молодых. Материалы четвертой открытой научно - практической конференции студентов, аспирантов и молодых ученых 19 мая 2011г., г. Пермь: ПГПУ, 2011. Источник: http://www.moluch.ru/









 Статья "Основы образовательной робототехники на уроках физики" (831 KB)
Статья "Основы образовательной робототехники на уроках физики" (831 KB)
 0
0 1570
1570 46
46 Нравится
0
Нравится
0


